I am starting this thread to capture the initial testing of the Tradheli Autotune feature. I would like to get a range of helicopter sizes tested with this software and welcome those users who are willing to accept more risk in testing this new feature. As testers, I will also ask for you to follow my instructions, answer some questions regarding your heli setup, and post the logs of your flights. I am still waiting to conduct my final checkout flight in my own helicopter before releasing it to you. But while I am waiting for a good weather day (hopefully this weekend), I wanted to start this thread and get the board types of my prospective testers. I will build the firmware for your board and then make it available on my google drive. You will have to use the load custom firmware option on your GCS to load the firmware.
So I will call those users out that I know were interested in testing and those that want to test can respond with your board type. Also please let me know what size heli you intend to test it with. @JoshW@picoflug@Murdoch@Steve_Mitchell@ZvikaF@DrKnow65@LoopZilla @picoflug Let’s stick with traditional helicopters for now. Once we get some confidence, we can have you try it on a tandem. Also I am wondering if my technique for tuning angle P will work for a tandem in pitch axis.
That is fantastic Bill to see this progress so far. Sorry, for health reason I have been grounded for quite a while. I hope that other enthusiastic RC Heli pilots are helping you now. Thanks again Bill.
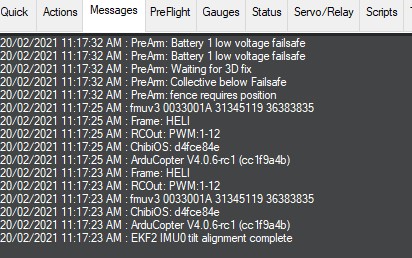
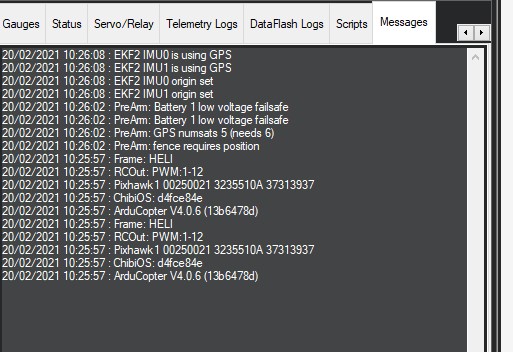
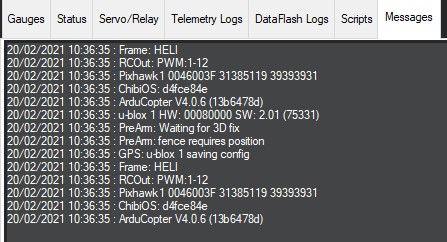
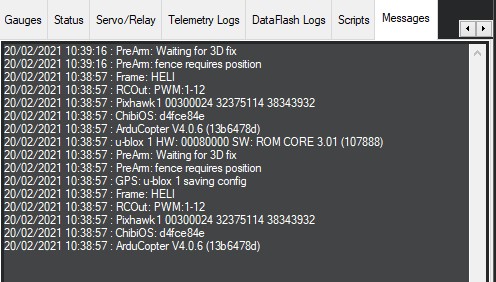
@ZvikaF Since there are several Pixhawk 1 boards, please read the board type from the message tab after you boot. You can see in the screen shot below where it says ChibiOS and then the line above it, it says CUAVv5 (which is the board). Yours might say something like “Pixhawk1” or “Pixhawk1-1M”. I need to know the exact board type.
Great! thanks all for your board types. Tomorrow looks good weather wise. So I hope to get out to check this and make sure it is ready to distribute to you. Thanks for your willingness to contribute!
I am 80% together with an Align 250 flybar, Maytek H743-mini and the M9N-CAN. It’s overweight with FPV gear so a “non-standard” tuning challenge. Will get it up and flying early this week. Still have camera and battery mounting to sort out but the electronics are wired and the mechanical adjustments are done.
Also have a flybarless rotor head I can put on if need be for tuning, but would like to keep the flybar head for “pilot assist” when I want to fly direct RC control. Looks like we will have winter again for a few days here before I can flight test.
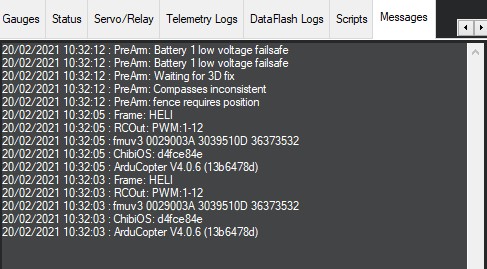
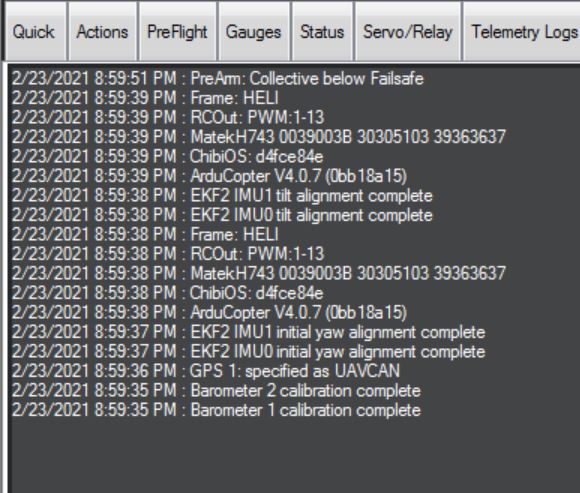
Sounds good. Could you do like the others and either screen shot your mission planner message screen to show what target I need for your board or post what it says?
I finished my test flights. Planning to build the firmware and provide a link tonight with instructions.
Here is a link to the initial release candidate of the traditional helicopter autotune! Please let me know if you have any questions. Please read over my instructions attached to the release below before you begin. Thanks for helping test heli autotune!
No sure if I am missing something here! I had a read through your Tuning guide doc but there is no mention of how to run the autotune? Which axis you want us to start on first? What param is going to be tuned first? It seems like it’s the odd wiki tune doc.
Just a note to everyone. Hopefully everyone understands that Autotune is a flight mode. You’ll need to set up the flight mode on a switch on your transmitter so you can switch into and out of autotune using your transmitter. You want to be ready to switch out of autotune quickly if you notice the aircraft not behaving properly. The firmware will revert the changes back to the original values before autotune was selected. This will require the user to be on the sticks overseeing the vehicle.
As for @Steve_Mitchell question on what axis to tune first. I would say tune pitch, roll and then yaw. Really this first release is more for me to gather data on how to tune the various size heli’s and how robust my algorithms are. the yaw axis may not tune up all that well. I am still learning about tuning yaw and the goodness of the tune will rely on how well you tuned your rate P and rate D gains. The Yaw set up for autotune is different than pitch and roll. With yaw, you will have tuned rate P and rate D where as with pitch and roll I’m asking that you set them to zero, at least for the first try so I can get some data. Then if you want to re-run pitch and roll axis autotune after you put in tuned values of Rate P and Rate D then that is fine. As I said in my instructions, you may want to just tune rate D gain and leave rate P at zero for pitch and roll axes.
Please ask questions if you are unsure of anything or if the instructions are unclear.
Thanks Bill @bnsgeyer for your hard work,
I can not open the GDOC … some how the link is not working for me
It might be something I lack … could you add a regular .DOC fire ?
Hello Bill,
I am late…
I have in all my helis the Pixhawk 4 mini. can you make a firmware for it or which shall I use?
I would beginn with a Protos 500. Then a scale with 3-blade and 1,60m rotor. when good, then a tandem.