There is a problem on the new homemade hexacopter. I take off approximately 2 meters and hang in the air. Just a few seconds after takeoff, the UAV begins to twist in place to the left. UAV position and height holds, but on the yaw refuses to accept commands. Even with a full yoke stick to the right,
UAV continues to rotate quickly to the left. The behavior is the same under the modes Loiter, AltHold, Stabilaze.
Errors that appear in QGC:
Critical: High GPS HDOP
Warning: EKF2 IMU1 ground mag anomaly, yaw re-aligned
Warning: EKF2 IMU0 ground mag anomaly, yaw re-aligned
…: GPS and AHRS Differ x.xx m
Flight controller Pixhawk 1 (2.8.4),
Firmware version ardupilot 3.5.4
Did a full recalibration of the accelerometer and compass. Before each subsequent iteration, recalibrated the compass.
Recalibrated the control panel(transmiter). Replaced by the same.
I tried to change the flight controller for the same one from a working UAV.
I tried to install the latest firmware (ardupilot 3.6…).
I tried to change the GPS module.
I changed the settings of the external gps-module (with a compass) and together with the internal one.
Have you tried the test flights in Stabilise?
This is just to find the base flyability of the frame without any of the Auto features getting in the way.
Your CW and CCW diverge considerably.
Do you have frame twist happening?
How similar in performance is your CW and CCW props?
I’ve also reviewed the logs and can’t see anything above what @mboland has said. I don’t know the frame you are using but are the motors offset (angled) and are they alternate angled to balance?
Yes, I tried Stabilize mode. In this flight mode, the behavior is absolutely the same. Similarly, in AltHold and Loiter.
Did not quite understand what frame twist means. The UAV is rotating around the vertical axis, the video is attached above. Frame of its own production, very strong, made on the basis of a similar from griphon
Propellers 2265 T-motor. Rearranged several times. Did not work out on purpose, in the process of various tests.
Transmiter was recalibrated, and then replaced by a similar one. Point 2 in my actions.
The frame is homemade, made very professionally. The frame is made in shape and size similar to the griphon frame http://gryphondynamics.co.kr/product/hexa-airframe-kit-v2
The design is very strong and reliable. The motors are located just like on a regular hexa frame.
Motor directions and propeller directions.
Transmitter reversals (Yaw left must move the bar to the left in Mission planner RC calibaration)
Remove transmitter trims.
Add some weights, it should not be a problem but your copter is heavily overpowered.
Do a hand held test (even if it is quite dangerous so use protective gear). Hold above your head and in stabilize mode give some throttle. Try turn it by hand, you have to feel the counter reaction. Also try to turn by rc stick, have to feel it to move.
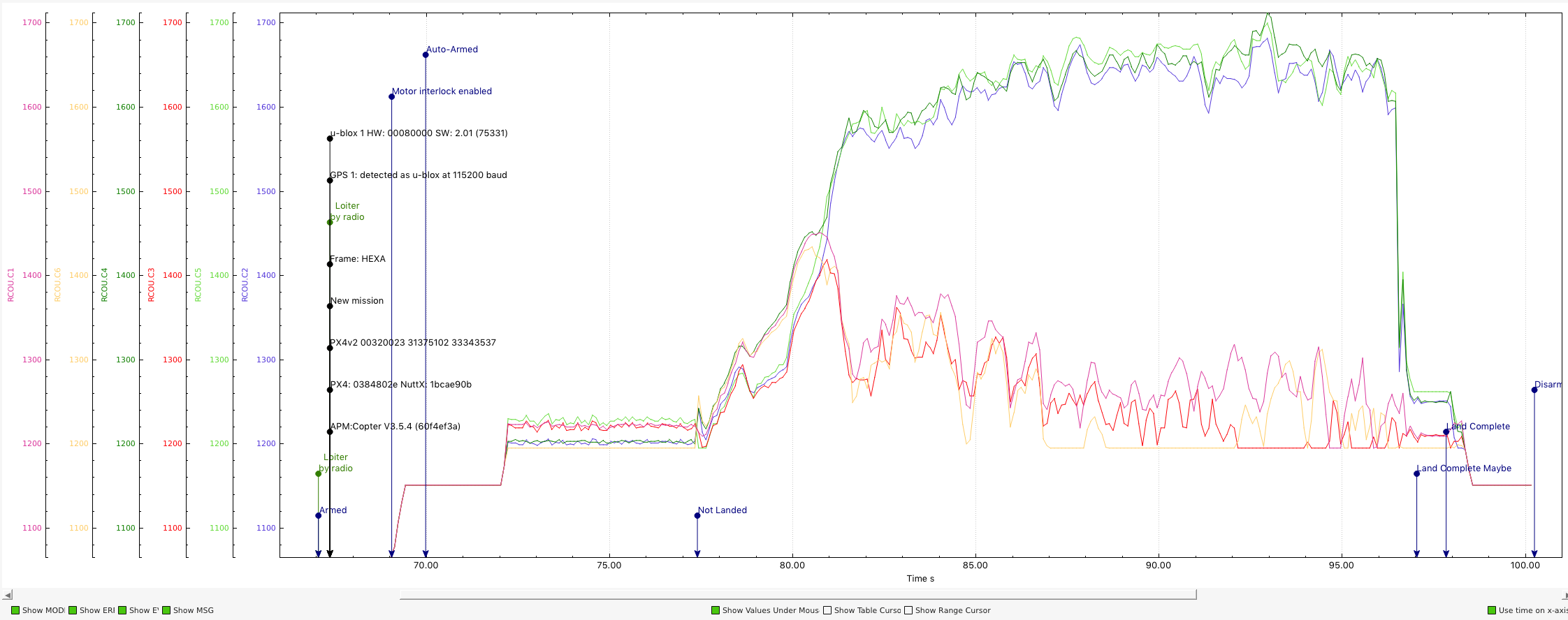
It turned out that the matter is insufficient rigidity of the frame beams. Therefore, during the flight, the controller began to compensate for the deviation of different levels of pwm-signals. And as soon as the required value for compensation went beyond the permissible limits (the lower limit of 1200pwm for RCOU.6, RCOU3 in first picture in mboland reply), the UAV began to twist in place.
Now the reason is found, it remains to remove the defect and recheck.
Many thanks to everyone who helped with advice and in particular mboland.
Ps. Maybe the name “Frame twist horror” is more suitable for this topic =)