Hi everybody,
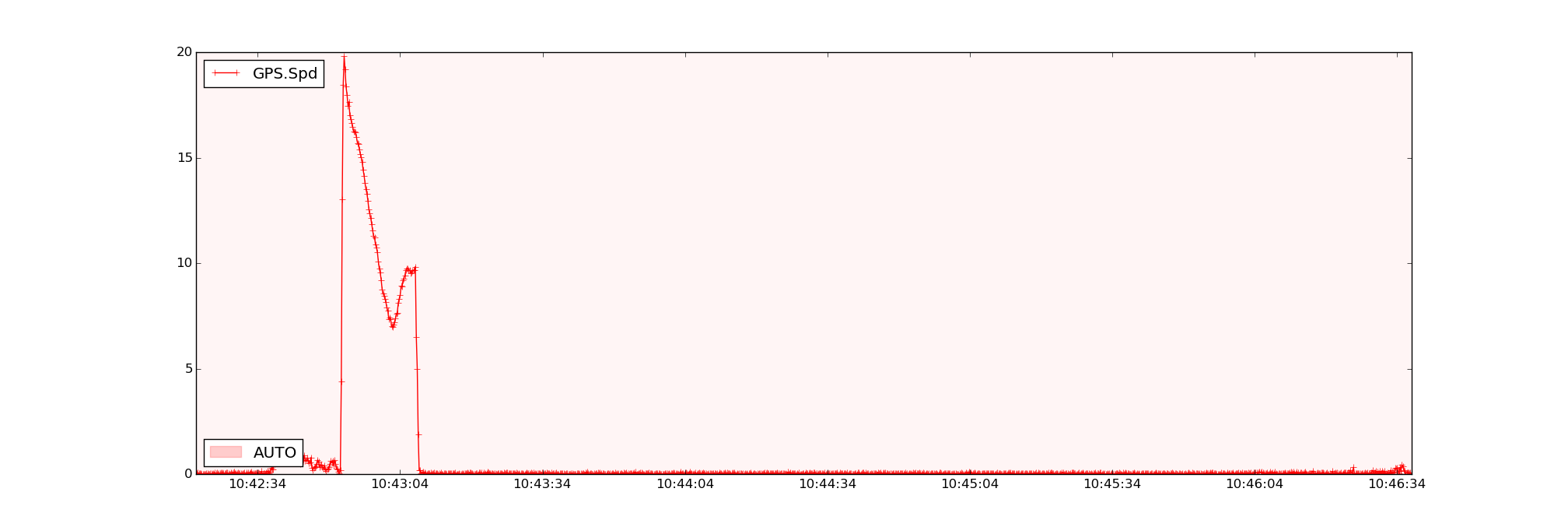
Today I tested the new arduplane, all worked perfectly except takeoff. After upgrading from 3.7.1 to 3.8.0, automatic takeoff stopped working when setting both parameters TKOFF_THR_MINACC and TKOFF_THR_DELAY different from 0. In a bungee launch, motor never starts (in 3.7.1 was working ok, problem tested in 2 different airplanes)!
Examples:
TKOFF_FLAP_PCNT,0
TKOFF_ROTATE_SPD,0
TKOFF_TDRAG_ELEV,0
TKOFF_TDRAG_SPD1,0
TKOFF_THR_DELAY,13
TKOFF_THR_MAX,100
TKOFF_THR_MINACC,15
TKOFF_THR_MINSPD,0
TKOFF_THR_SLEW,0
Result: Motor never starts after bungee launch…
TKOFF_FLAP_PCNT,0
TKOFF_ROTATE_SPD,0
TKOFF_TDRAG_ELEV,0
TKOFF_TDRAG_SPD1,0
TKOFF_THR_DELAY,0
TKOFF_THR_MAX,100
TKOFF_THR_MINACC,15
TKOFF_THR_MINSPD,0
TKOFF_THR_SLEW,0
Result: Motor starts on bungee launch, takeoff correct.
TKOFF_FLAP_PCNT,0
TKOFF_ROTATE_SPD,0
TKOFF_TDRAG_ELEV,0
TKOFF_TDRAG_SPD1,0
TKOFF_THR_DELAY,13
TKOFF_THR_MAX,100
TKOFF_THR_MINACC,0
TKOFF_THR_MINSPD,0
TKOFF_THR_SLEW,0
Result: Motor starts on bungee launch, takeoff correct.
TKOFF_FLAP_PCNT,0
TKOFF_ROTATE_SPD,0
TKOFF_TDRAG_ELEV,0
TKOFF_TDRAG_SPD1,0
TKOFF_THR_DELAY,0
TKOFF_THR_MAX,100
TKOFF_THR_MINACC,0
TKOFF_THR_MINSPD,0
TKOFF_THR_SLEW,0
Result: Motor starts on bungee launch, takeoff correct.
Maybe is a small bug?
Thanks in advance!

{kind=link}