I am new to ardupilot but I have read a lot of blog posts and the forum.
I began my arduplane journey from the clouds with counter rotating props and never had an issue regarding adverse yaw because i used counter rotating props 11x8 apc i believe.
Since moving on to the believer, and following @Naterater famous thread regarding benchmark testing, i have used 12x12 E non counter rotating setup for the believer. It is a 6S setup with 640kv brotherhobby t5 motors. I have faced a consistent issue of the aircraft rolling leftwards against the prop motion during takeoffs in FBWA. The plane rolls left and dips down and once it has enough speed and hasnt touched the ground, the autopilot levels it out and it starts climbing if it hasnt crashed by then lol. Specially if the wind while takeoff is around 10 kmph, the aircraft just crashes because while rolling at initial launch, it starts pointing cross wind.
I am currently unable to get my hands on 12x12 counter rotating props due to covid-19 and i am unsure whether this behaviour is due to adverse yaw or something else? My current setup draws about 67 to 68 amp current during takeoff.
Any suggestions / solutions regarding the dilemma?
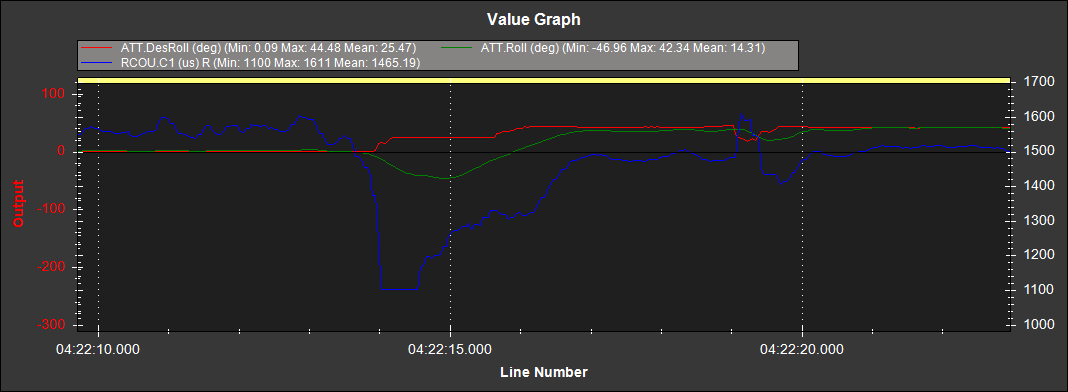
AP is giving it full aileron to correct. I guess you either need more aileron travel or more airspeed. Or of course less imbalance.
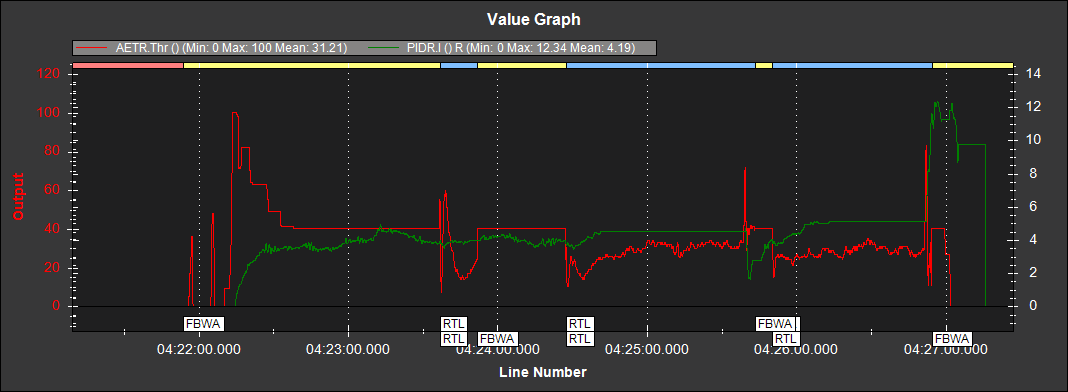
This is the roll integrator term vs throttle, you definitely have a roll imbalance to one side, on a ‘perfect’ aircraft it would be zero. Might be reading a little to much into it to say the integrator changes with throttle although it does look like it in places.
Oh, so that’s how you check roll imbalance. I read about the pitch imbalance so knew what that means. Now i know this. You learn something everyday.
I believe @pompecukor mentioned somewhere that on rc aircraft, adverse yaw does not have a huge effect. But i see otherwise here. I guess it is time to wait for counterclockwise props.
I’m not sure this is adverse yaw, just a roll imbalance.
Of course this is not conclusive that the roll imbalance is caused by motor torque, there could be other things. The most obvious is to check the CG. Sometimes foam wings can get a little warped.
I haven’t flown a beliver myself, but many people have had a lot of success with them.
I have observed one thing. Both motors do not start rotation at the same time (infact, the left motor delays starting by a tenth of a second if I throttle up fast. I can also reproduce this when giving a little throttle and right motor starts and left one doesnt. The plane also rolls left, seems like a connection?). I have calibrated the ESCs multiple times but result stays the same. I am not using the ESC BECs so their red wires are disconnected. It could also be linked to the roll imbalance.
CG seems to be correct. A little nose heavy but it shouldnt cause this problem.
Perhaps it is either the props or motors not starting at the same time.
Should i try takeoff mode instead of launching in FBWA mode?
ah, that could well be it. You could use throttle left and right on separate outputs rather than a single throttle output. You might be able to adjust the mini and max to compensate for the esc’s being out of cal. AP will also apply some differential thrust to try and correct.
Long day today. First i tried the differential thrust setup on the bench. Plugged in the motors in servo 5 and 6 for right and left respectively and selected proper outputs. Calibrated the ESCs again but they were behaving the same way. However, this time it was more obvious that the left motor was lagging a bit behind due to different throttle outputs in the mandatory setup. The signal for both motors started from the same pwm of 1100 but started showing differences with the left on3 lagging behind by 10 to 12 pwm values. They topped at a max of 1900 though.
Anyway, after trying this setup, i decided to change the ESCs and moved throttle back to channel 3 for both motors, calibrated the ESCs and voila the problem was gone. The old left esc might have been faulty. Although this solved the start problem but when i changed the new escs to differential thrust, the problem started appearing again with the left motor lagging a bit behind. So moved the throttle channel back to channel 3 and recalibration got rid of the problem again.
Now i have to test the situation in flight but I am waiting for the counter clockwise props to arrive. Also will change the escs to t motor 55a and the motors to AT3520 550kv. Learnt a lesson not to use cheap chinese ESCs again. The ones giving correct results are jeti 40A opto sb hs.
Tested the results of using counter rotating props. The takeoff behavior seems to be perfect now. I do have a bit of roll imbalance remaining but that could be due to having a slightly different angle of attack on one motor. Besides that, the aircraft takes off in a straight line now.
It could be due to counter rotating props or maybe due to eliminating the motor start difference by changing the ESCs. Who knows maybe a little of both.
Thanks again for your help and pointing me in the right direction.