Hey!
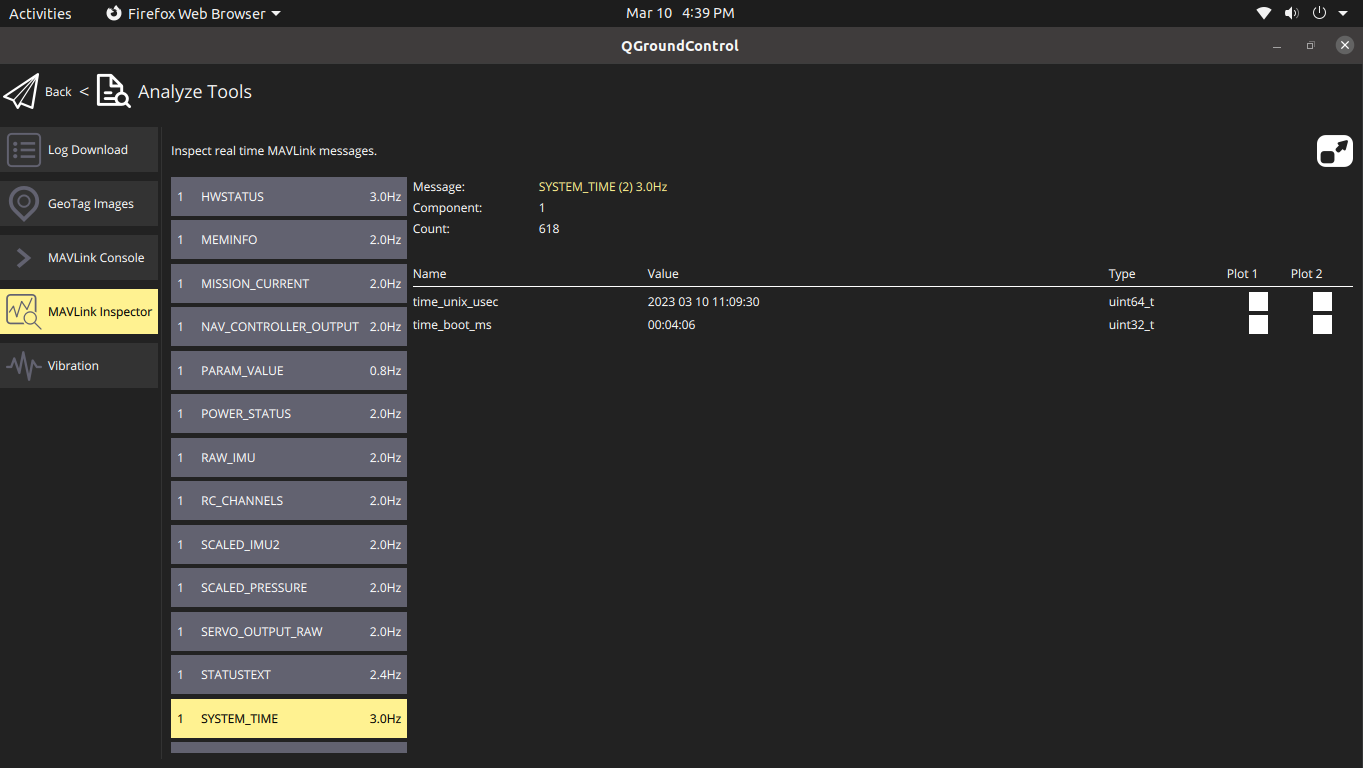
I am trying to get my QuadCopter running ArduPilot firmware ArduCopter v4.3.4 to operate with MAVROS using telemetry module. I have downloaded MAVROS and I’m connecting it with my QuadCopter but the terminal is showing errors as RTT: TOO HIGH FOR TIMESYNC. However I have followed every step as mentioned on the ArduCopter website ( Clock/Time Synchronisation — Dev documentation ). But on checking the times on the FCU and the System, they appear to be different. (Pic shows Mavlink Inspector running in Q Ground Control GCS showing time to be almost 5.30 hrs behind the actual time).
Please tell me is it absolutely necessary for this timesync function to be running or will the QuadCopter still be fully functional over ROS without syncing time between the 2 systems?
Also, I am not using GPS as this QuadCopter is for indoor usage so relying on GPS for time is not possible.
Please help me through it someone!
Thank You!