My son and I built a quadcopter, hoping to be able to use it for aerial photography. Some of the equipment on the quadcopter are as follows:
- DJI F450 Flamewheel frame
- 3DR Pixhawk PX4 controller
- DJI 2212/920KV motors
- 9.5 x 4.25 carbon fiber props
- E300 ESC’s
- GPS antenna
- FlySky FS-iA10B receiver
- Plastic legs
- Remote camera trigger
- Samsung NXmini camera (1" sensor, 20.5MP)
- Floureon 5500mAh 3S 35C battery
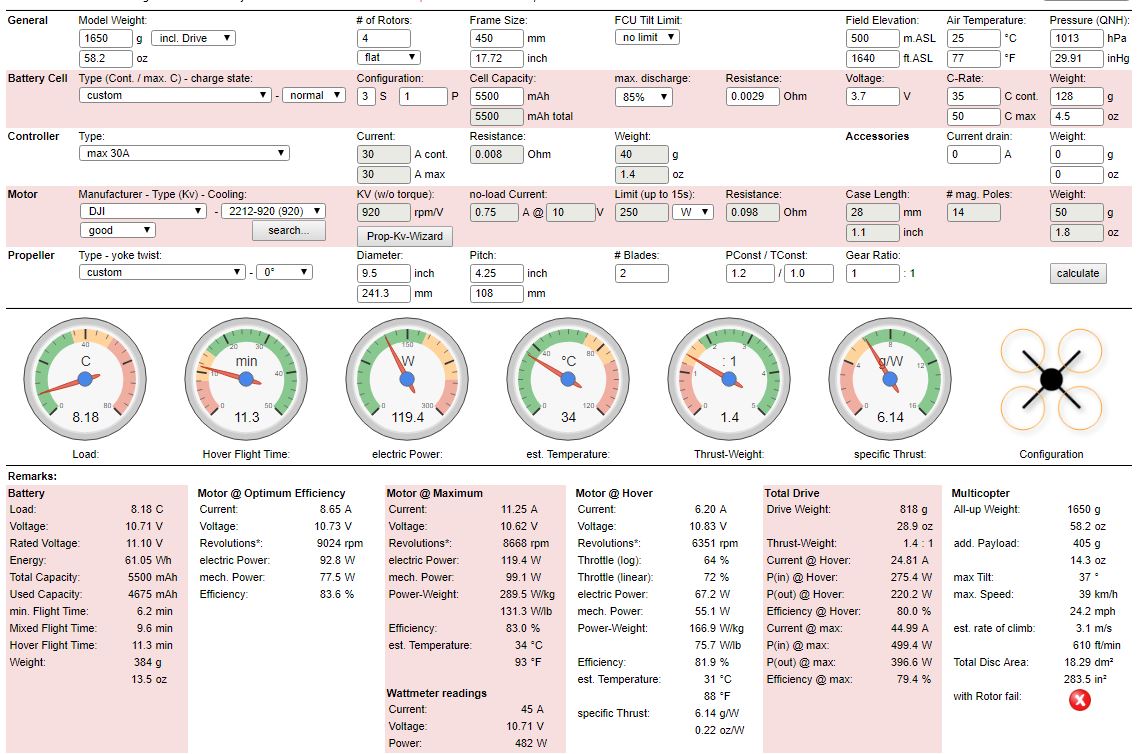
The frame with camera box and all other accessories weighs about 35.7 oz, the camera an additional 8.0 oz, and the battery 14.4 oz, for a total weight of about 58.1 oz, or about 1.65 kg.
We had flown the drone without the camera, and with older and lighter batteries, and it performed well, hovering at less than 50 percent throttle, and was responsive and stable. However, upon adding the new heavier battery and the camera, it became very difficult to get off the ground and control.
The gist of the problem seems to be that the drone is simply too heavy for the motors to carry. More upward thrust is needed. I’m looking for suggestions as to whether it would be better to
A) modify the drone we have, or
B) retire it, and get something larger.
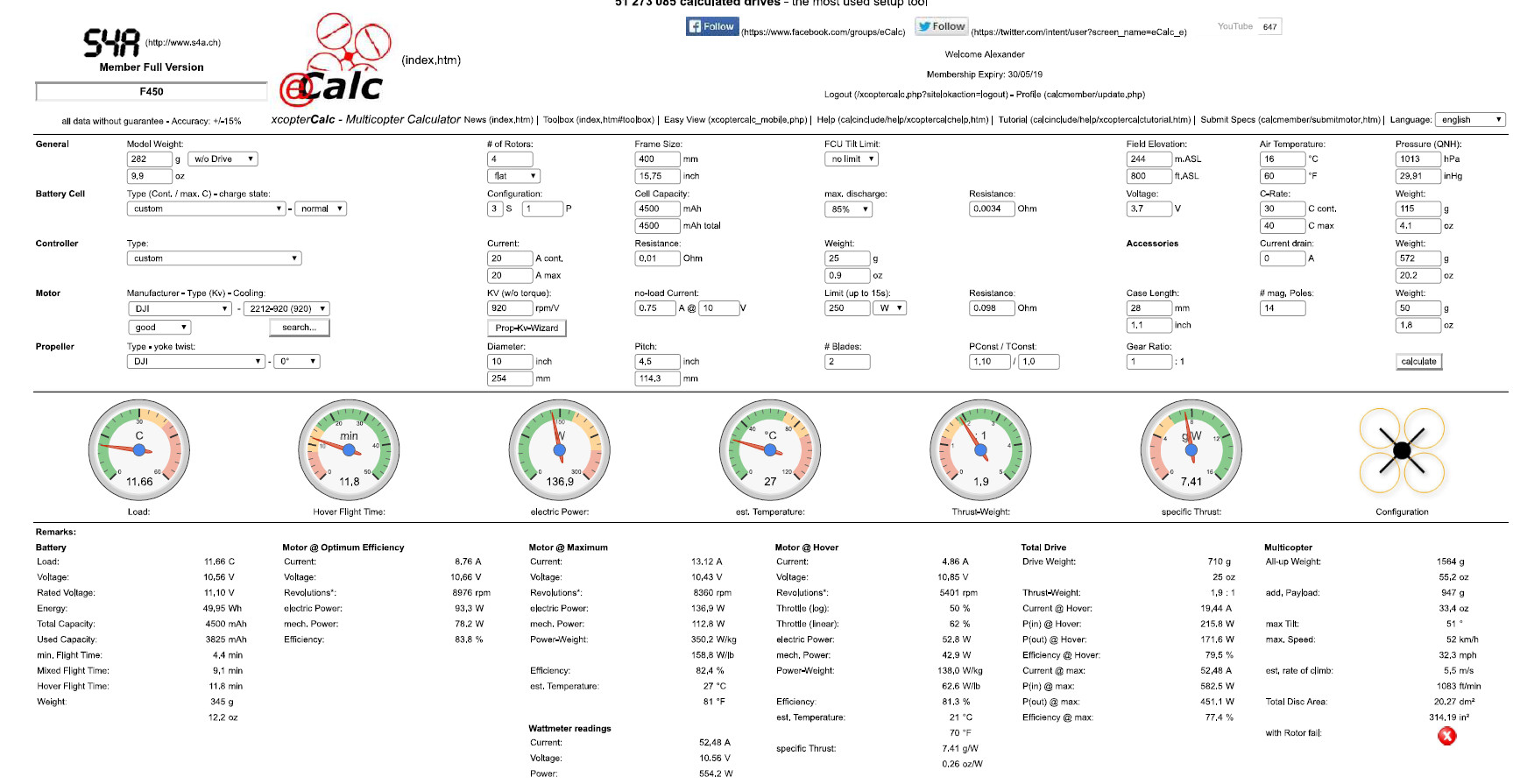
As for option A, it seems we might use larger diameter propellers and/or more powerful motors and ESC’s. But, we are not sure precisely what components to get, or even whether it is a good idea to try to carry so much weight on this frame.
As for option B, the options are limitless. We have considered changing the frame to a F550, or even upgrading to something larger like the DJI S900 or S1000. The larger frames are attractive to me because of the ability to carry more and better equipment, but also comes at a price tag which I’m not excited to pay.
Would appreciate any comments or suggestions on this situation. Thanks in advance.
Al