I used a 5.2Ah multistar (10C) battery, which is quite a bit bigger than the recommended battery, but its what I happened to have available. I added 30g of lead to the tail to keep it balanced with the larger battery.
Other than that I used the stock motors and ESCs from the RTF kit
I’m still alive so thanks for fixing the tilt rotor issues initially seen on the CL-84. I like the way this forum pings you lightly with updated posts so you can catch up.
Congratulations are in order to Rolf for his first successful transition to full forward flight. I hope the tree landing didn’t cause excessive damage. I was very lucky on my thick bush landing with the CL-84.
Although I have converted my CL-84 back to stock form, it really is a quick conversion back and forth to a Pixhawk with APM. I will consider converting it back during these long winter months of building. My indecision comes from the limited power of the stock design along with rather high wing-loading.
My VTOL hangar has grown to the following planes:
FireFLY6 DIY25 with Mapping Key (tiltrotor)
FireFLY6 DIY15 with Sport Key (tiltrotor)
Bix3 QuadPlane
Ranger EX QuadPlane
CL-84 (tiltrotor)
Ares V-Hawk X4 (tiltrotor)
I don’t have any interest in the E-flite Convergence as my focus changes to creating “productive” designs that can carry a 2.5lb-5lb (1.13kg-2.27kg) payload. The FireFLY6 and Ranger EX QuadPlane fall into this category. However, the FireFLY6, keys, and spare parts are expensive. The QuadPlane design on a low cost frame with available low cost spare parts has my main interest. The Ranger EX falls into this category and can easily carry a 5lb (2.27kg) payload. I’ll continue to look for suitable frames for testing the tiltrotor firmware. It would also be interesting to compare efficiencies between a tiltrotor implementation and a QuadPlane implementation.
Congratulations on your successful CL-84 transitions and autonomous flights! I am glad that you found and fixed several bugs to make this happen.
I use the 3s 5.2AH Multistar packs on my FireFLY6. They make several different sizes though. What dimensions are the pack that you used? Mine are 142 x 49 x 22mm.
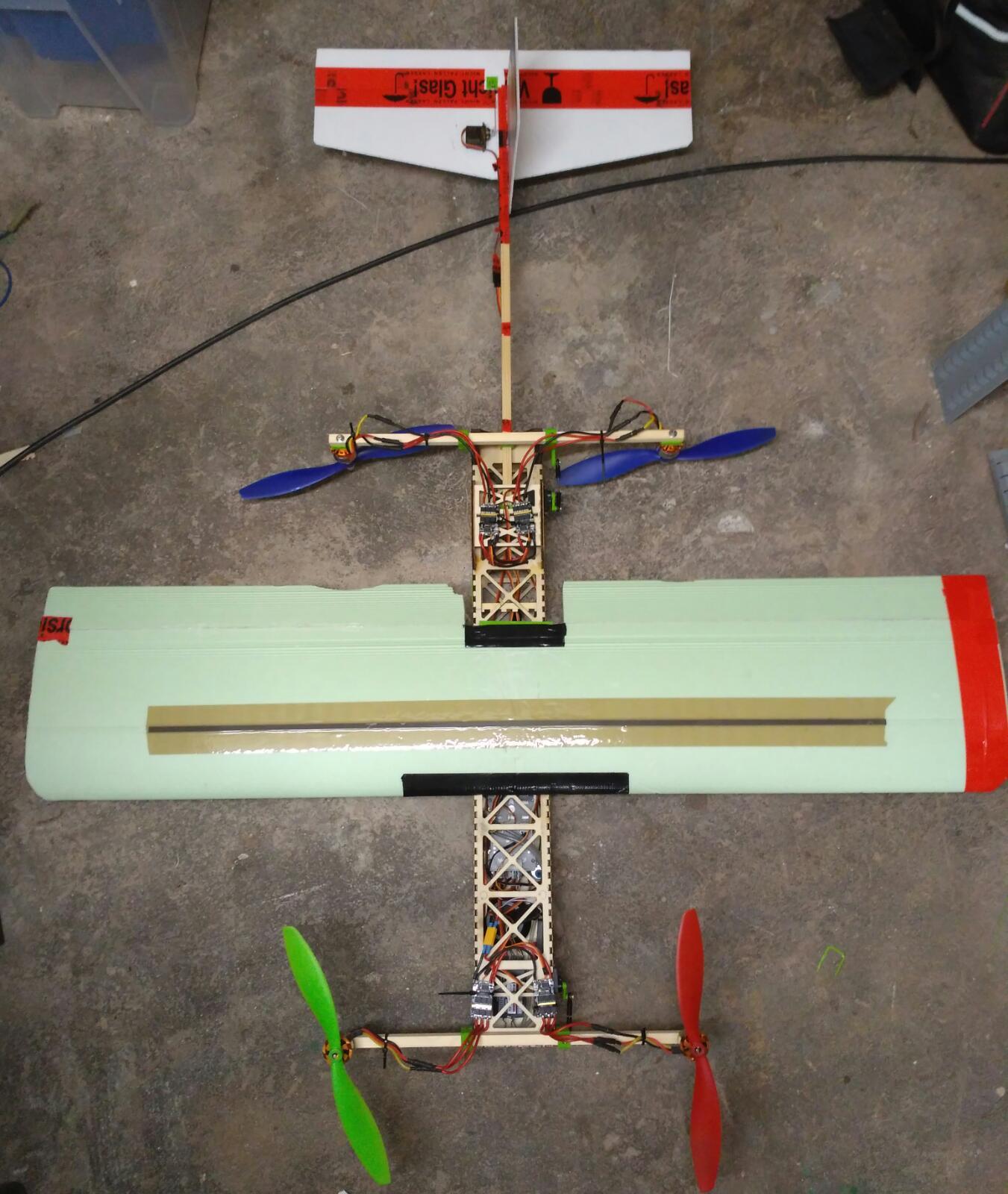
I cut away some of the foam to make it fit. You can see it fitted here: https://goo.gl/photos/pP2ayPD2fdi8is7N9
it is pushed right back against the wood of the tilt mechanism, and I added 30g of lead on the tail.
support for Q_TILT_TYPE is now in master along with the other fixes, so anyone wanting to fly a tiltrotor or tiltwing should now just use the ‘latest’ build. For a tri-copter make sure you set Q_FRAME_CLASS=7.
Is anyone willing to try a FireFly6 with the latest APM:Plane? It should work, and does work in the simulator, but I’d appreciate feedback from someone who has the airframe and is willing to try it.
I’d be happy to provide config details if needed. I’d need to know what the servo output mapping (which output goes to each motor, which motors and CCW and which are CW, and which outputs go to the tilt mechanism). I’ll then mod the simulator to use the same output mapping and provide a set of parameter values which should fly it.
Thanks Tridge and Rolf,
on Friday we did some transitions with 3.8.0-beta1 and Saturday with the one Rolf suggested.
Our airspeed wasn’t working on Saturday, so we can’t supply any helpful information.
We are using a Quad with four tiltable motors. Right now we flow everything in QHOVER, MANUAL, STABILIZE and FBWA. We have to fly in windy conditions and experience a bad YAW behavior because of bad YAW authority if you are in forward flight and your roll and pitch input doesn’t fit together. Our current solution is to reduce YAW_P to 0. Otherwise two motors will throttle up to max throttle, the airframe is still flyable but sounds bad.
I hope I can support you with helpfull logs soon. But first airspeed has to work.
Hi @stundenblume, current master works without an airspeed sensor with quadplanes. It would be best in low wind though.
For your 4-tiltable setup, what is the motor order and motor direction? With a quad with 4 rotors tiltable it is critical that the front right motor be clockwise not counter-clockwise, otherwise the yaw moment from the prop as it tilts will cause more roll and you’ll never get it stable.
Can you post some photos of your build?
I’m all in with our FF6. Definitely could use help with the config and I’ll get you our current output map. Appreciate the help, we had pretty much shelved it until we could figure out its issues but it’d be nice to see it fly again.
Is anyone willing to try a FireFly6 with the latest APM:Plane?
It’s on my mind since I now have a second pre-enjoyed model which is only a DIY15. My primary FireFLY6 is a DIY25 with a Mapping key. The DIY15 only has a Sport key which doesn’t include Loiter and Auto modes. After I play around with it for a while “as is” then I may simply load the latest tiltrotor build to save myself $200 for a Pro key.
It is unfortunate that BirdsEyeView Aerobotics has gotten out of the R/C hobby sector and now focuses on commercial sectors. However, I understand their business needs. It would be great if Hobby King copied the frame. We need more VTOL ARFs!
Thanks @TimWallace and @GregCovey!
Along with the output servo mapping, can you send me a log file of a FF6 flying (and doing a transition) with the standard firmware? That will help me with the tuning. A dataflash log would be best, but a tlog would also help.
MAIN_01: L Elevon
MAIN_02: R Elevon
MAIN_05: Front Right Top Motor
MAIN_06: Front Right Bottom Motor
MAIN_07: Rear Top Motor
MAIN_08: Rear Bottom Motor
AUX1: Front Left Top Motor
AUX2: Front Left Bottom Motor
AUX3: BEC power to rail
AUX4: Gear
AUX5: Transition Axle
AUX6: Camera trigger
This is the last flight we had with AvA 1.1:
Mostly auto mode. Take off and landing were less than ideal but the fixed wing acquisition was great.
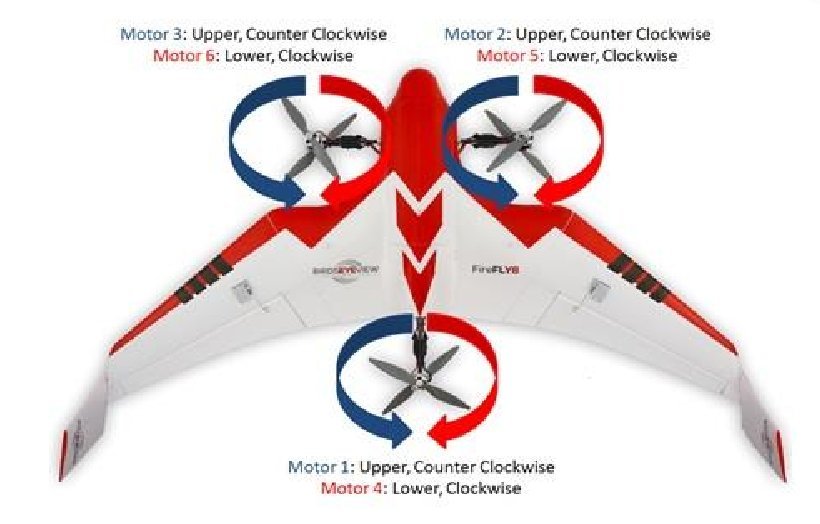
With a FireFLY6 on AvA, all motors spin CCW when viewed from the actual motor top. When viewed from the top of the wing, the upper motors face up and the lower motors are inverted, all the upper motors spin CCW and all the lower motors spin CW.

{kind=link}