ok, thanks Greg!
I’ll mod the SITL sim to match that
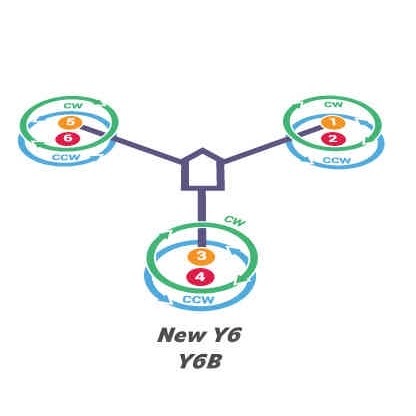
I added a diagram above.
Hello everyone!
I’m new to APM and Pixhawk. I wanted to ask for help on bicopter with fixed wing. I built a bicopter and it can hover well. Now I see that Tricopter CL-84 can transition to plane mode with two rotors. Therefore, I was wondering if I can use the same code for forward flight and transition for bicopter? I built the px4 code with APMCopter and set stabilize mode everywhere in mission planner. Bicopter’s structure is as follows: it has two rotors and each rotors are on servos that can tilt the rotors. I also have elevons, since it’s a flying wing. Basically it looks like following, but small drone version:
Question is, how can I transition it to forward flight? Is it ok if I ask basic questions like is .param and how do I change it?
Thanks in advance
As Greg noted, we have our ESC’s hard wired to the motors to turn as per the diagram he posted (i.e. CCW looking down at the top of the motor for all six). Right now we have the ESC servo wire connections to the Pixhawk sequenced according to the Y6B diagram:
@ayertay right now we don’t support bicopter quadplanes, but it certainly should be possible to add it.
Can you post a photo of the vehicle you’ve built, and if possible a video of it hovering?
Note that I will work on the FireFly6 first, I may not be able to get to bicopter for a while.
@TimWallace thanks TIm, I’ll let you know when I have a config for you to test
You are right. I will try both configs with the next flight. Hopefully today.
@stundenblume which way do the rear motors tilt btw? It’s not quite clear in the photo
I think to make it work you’d have to make them point downwards, and tilt towards the back
The rear motors tilt up to the back.
ok, that should work. Normal X config for motors needed and Q_TILT_MASK=15. You’ll just need the arms to be stiff enough to cope with the yaw torque.
I’ll post the video as soon as I get done the battery compartment. Meanwhile, does CL 84 transition from ArduCopter to ArduPlane code? Which files should I modify to make the transition?
We doing already transitions since ~6 weeks with that airframe. We had the same problem as Rolf with a lot of throttle while the transition. Our solution was
- gain height in QHOVER
- cut throttle
- pitch forward
- switch to MANUAL
- wait 3 seconds
- switch to FBWA
Also we had the problem that always one pair of motors go to the max (1&2 or 3&4). That we solved by lowering YAW_P to 0. So it was nicely flyable just with roll.
For the next flights we will tray your suggestion witch the X configuration and we will do more testing witch the beta2.
ok, great, please post a dataflash log when you try it. Try a transition from QHOVER → FBWA and from FBWA → QHOVER.
it flies like other ArduPilot quadplanes. See QuadPlanes — Plane documentation for docs.
For parameters, have a look at what I had setup here:
http://uav.tridgell.net/CL84/cl84-parameters.parm
You don’t need to make any code changes to make the CL84 do transitions. Just use 3.8.0beta2 of plane, and the above parameters.
can anyone help me to construct a special feature tracking by Ardupilot on a quadrotor ?
plz reply me by email :
robo.2050@gmail.com
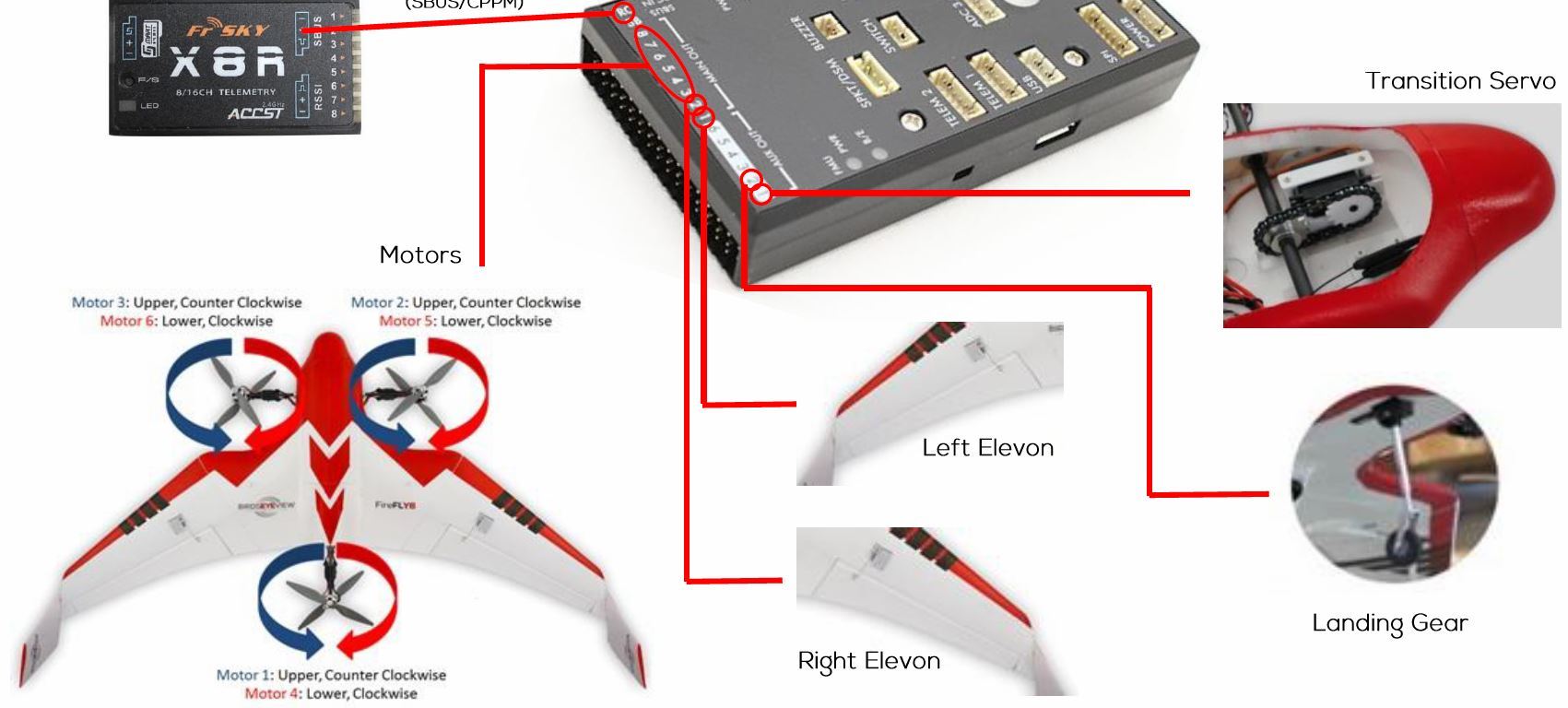
@GregCovey the picture shows a different motor ordering than the list @TimWallace gave. For example, in the picture Motor1 is the rear/top motor, whereas in the list Motor1 is the front/right/top. Can you or Tim work out which is correct?
I also need to know the direction of the gear channel and transition channel. The log from @TimWallace doesn’t show RCOU values for above channel8, so I can’t tell. When AUX5 is high are the motors pointing up or pointing forward? Is it a continuous servo (so we can tilt the motors at any angle we want) or a binary retract style servo? What PWM values correspond with straight up and straight forward?
For now I’ll just take some guesses and we can tweak once we have numbers
Tridge,
The diagram Greg posted shows the configuration that AvA uses and is how we have the ESCs soldered to the motors. At this point when power is applied, the top motors would spin anti-clockwise, the bottom motors spin clockwise.
FireFLY6 with AvA Onboard Manual:BirdsEyeView Aerobotics
I wired the ESC’s to the Pixhawk according to the Copter docs:
http://ardupilot.org/copter/docs/connect-escs-and-motors.html
With the tractor and pusher props we have and the prop shafts on the motors, the AvA diagram is how they should spin. I can’t say as to the numbering…
ahh, ok, thanks Tim. I had assumed you had it wired as it comes with AvA.
With the 3.8.0beta2 we can do any wiring ordering you like, so if you wanted to make it match the AvA ordering we can do that. With 3.7.x it wasn’t possible to put the lift motors on the first 4 channels
I think I’ll make the sim match what AvA does, although then I’ll need input from Greg on what channels have the elevons and what channels do the transition servo and landing gear.