Hi Rolf, what outputs did you use for the front ESC’s/motors and servos? And what for the servo on the rear motor/ESC?
I would like to use the front motors for yaw and have a fixed rear motor and am trying to figure out the wiring details.
Hi Rolf, what outputs did you use for the front ESC’s/motors and servos? And what for the servo on the rear motor/ESC?
I would like to use the front motors for yaw and have a fixed rear motor and am trying to figure out the wiring details.
Hi Rolf,
Great to see first tiltrotor transition, even if it was partial!
Based on simulation my main concern with the code as it is now is not the forward transition, but the reverse transition from fixed wing to hover when the aircraft is flying at high speeds. I’d suggest that for first flights doing a fixed wing to hover transition that you let the plane slow down to just above stall before switching to QHOVER or QSTABILIZE.
Cheers, Tridge
I published a 3D printable tilting motor mount on Thingiverse which I’ll be using on my VTOL tricopter. Still a work-in-progress.
I’ve been following this for awhile and have a question. I’ve been flying an experimental Tri with Copter in a Pixhawk 2.4.8 with a wing on it, static mounted at 15 deg AoA, in an attempt to get an hour of flight time from it. It would be trivial to put tilt rotors on the wing and add ailerons to it:
My question is, if I try this experimental ArduPlane code in the 'hawk with tilt rotors, does the current implementation of the code leave the tail rotor active for pitch and yaw control in horizontal flight? Or would it require the addition of horizontal and vertical stab’s with control surfaces? I have experimented with taking it up to 120 meters altitude and cutting power and let it glide. I have perfectly acceptable yaw control from tail rotor drag with no power to the tail rotor in a glide. But no pitch or roll control. I kept adjusting the CG forward until it glides with no power, and have bigger motors and props on the wing vs the tail. Just bringing the throttle back up recovers it nicely from a glide.
Even if I could tilt the wing rotors ahead ~30 degrees I think it would greatly enhance efficiency and forward flight speed. Just wondering about the tail.
no, it doesn’t. Possible to add of course, but for now it would need fixed wing control surfaces
Tridge, do you have the channel out assignments for a tilt rotor plane (front motors tilt, rear static)? I’ve only seen the ones for the quadplane in the wiki
I have AUAV-X1 & X2 flight controllers, do you know if their extra channel outputs are active otherwise I’ll have to source a Pixhawk?
thanks tridge. I think my idea is too far off from the current QuadPlane project to be useful. My thoughts were that conventional fixed wing controls are redundant and amount to what is essentially dead weight for VTOL. And the VTOL components become dead weight in horizontal flight. Thereby limiting useful payload and increasing complexity of the redundant systems.
So I had a totally different idea of adding differential tilt capability to the wing rotors on a couple output channels. And still use the tail rotor for greater payload capability, and wider range of CG, in VTOL. But also use it in horizontal flight to reduce the number of redundant flight control systems. With differential wing rotor tilt I can also eliminate the need for ailerons. I’m pretty sure this has already been done with both ArduCopter on APM (a couple years ago I think I saw a fork), and Cleanflight - using vectored thrust on a Tri.
Sorry for the divergence from the main topic. I think my concept is too much different than the QuadPlane implementation of a VTOL airplane. But I have done enough flight testing with this bird with the wing on it to determine it will work with vectored thrust. Just have to figure out how to do it.
Hi Tridge,
we will adjust the PID values as sharply as possible before testing reverse transition. Of course flying at low speed before reverse transitioning.
@Graham:
You need a servo for the rear motor. Wiring details:
Tiltrotor support for plane
( I recommend you to read the whole thread from the beginning)
Regards Rolf
The thread you refer to relates mostly to the CL84 which is a tilt-wing not a tilt-motor and thus the channel assignments are not the same. I want to use the front motors for yaw control and not have the complication of the rear motor having a tricopter like tail mechanism.
I would like to use a setup like this:
I’m modifying an airframe at the moment but if I can sort out the channel assignments first it’ll help a lot.
That’s what I was referring to also. I would like to use differential tilt on the wing motors, which will provide yaw control in VTOL, and roll control in horizontal flight. If the prop rotations are right, like any multi-engine airplane, simply throttling the motors in horizontal flight will provide yaw and roll from differential thrust and torque. Adding differential tilt to the equation in horizontal flight adds very positive roll control, and would totally eliminate the need for conventional fixed wing control surfaces.
The current implementation is using the Tri code for VTOL and transition to plane for horizontal flight. I think there’s a more efficient way to do it that eliminates complexity and weight in the aircraft design.
Hi Graham,
our plane is flying with the above mentioned assignement. Because it has standard servos, the parameter Q_TILT_TYPE is set to 0 (For HK CL-84 “Binary” type Servo Q_TILT_TYPE=1) .
Hi Rolf,
What is the airplane brand and model name you are using?
Regards.
Hi Greg,
the airplane is self-constructed (mainly depron), designed and built by an Austrian friend of mine. Since he comes from Salzburg ( http://www.salzburg.info/en ) , the name of the plane is, of course, Mozart 
Greetings Rolf
Hello,
right now I’m building my first tiltrotor. I did some testing and I wonder how the plane behaves while switching vom hover to stabilize or FBW.
I expected that the tiltable motors tilt forward as I switch from hover to stabilize to gain speed. But right now it seems to be that I have to pitch the copter/plane to gain speed. correct?
@Rolf
You tried the transition already with Mozart. Did you take off with the tilted motors or is 30° tilted your endpoint? Did you already reach transition airspeed?
Sebastian
Hi Sebastian
we have chosen the following sequence: first (lift off) in QSTABILIZE (same as STABILIZE at Copter), then QHOOVER (same as ALT HOLD MODE at Copter), then FBW-A.
As soon as you switch to FBWA, the rotors start to tilt.
Parameter Q_TILT_RATE is the maximum speed at which the motor angle will change (10 - 300 degrees/second)
to Q_TILT_MAX (ie 30). Only when the ARSPD_FBW_MIN is reached that the motors completely tilt.
We have only tested the first part of the transition:
Regards Rolf
Hi Rolf,
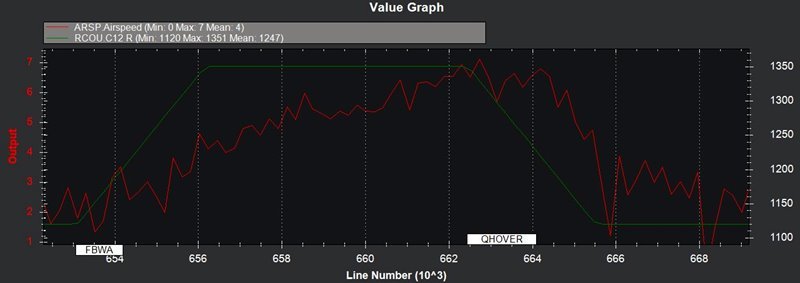
thanks for your explanation. I was just wondering because I tried the “transition on” my bench by switching from QSTABILIZE to FBW and the tilt servos didn’t move until I blown against the pitot tube and reaching FBW_MIN.
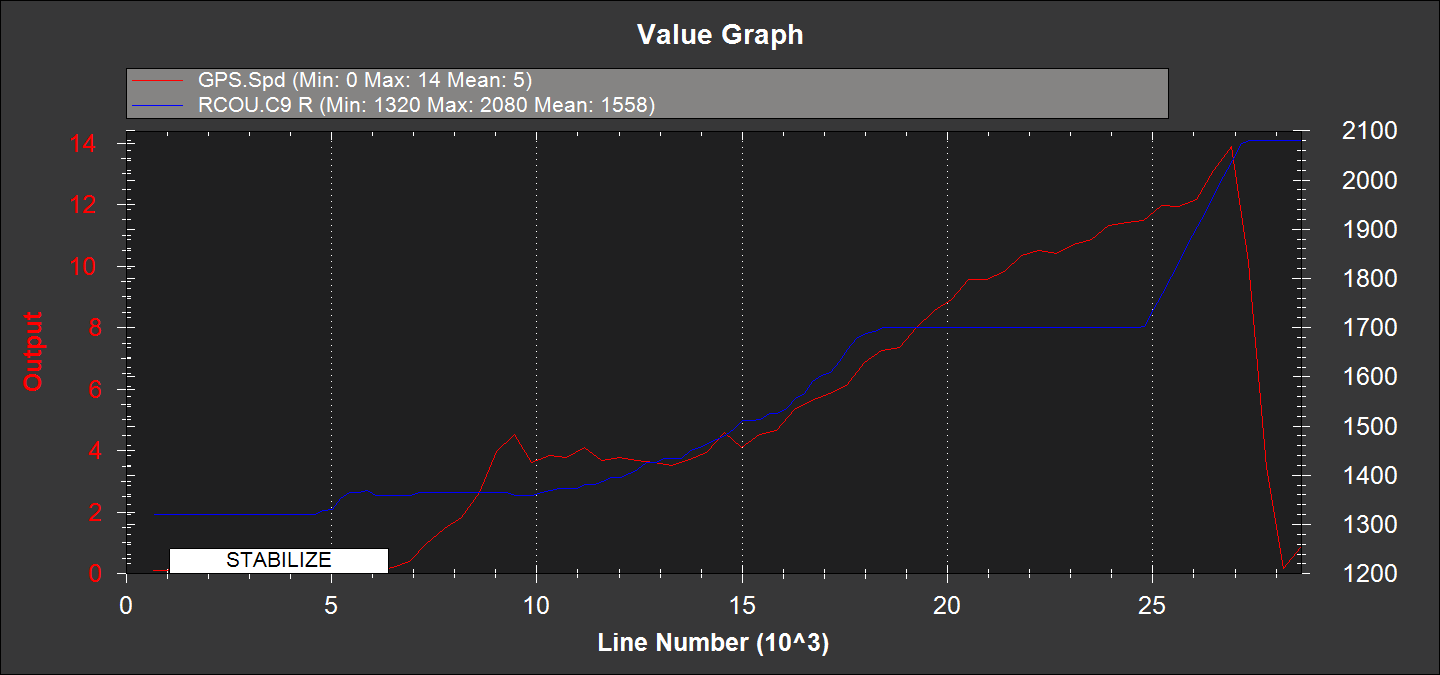
Meanwhile I did a successful transition from QSTABILIZE to ROVER  (without damage). Here you see the graph with groundspeed and the tiltservo output. You can see how the Servo tilts while the speed increased and waits for FBW_MIN Speed with Q_TILT_MAX. After that it tilts to the endposition.
(without damage). Here you see the graph with groundspeed and the tiltservo output. You can see how the Servo tilts while the speed increased and waits for FBW_MIN Speed with Q_TILT_MAX. After that it tilts to the endposition.
How to disarm in QSTABILIZE?
I know there is a bug in 3.7, but shouldn’t it be fixed in 3.8? I set ARMING_RUDDER=2
Sebastian
I found a more accurate description how the tilt angle emerge.
https://github.com/ArduPilot/ardupilot/blob/master/ArduPlane/tiltrotor.cpp#L75
Hi Sebastian,
our temporary workaround for the disarm issue is to press the safety switch (mounted far enough from the props)
Which firmware do you use ?
We use this firmware-build for pixhawk from Andrew Tridgell Tiltrotor support for plane and C12 (why do you use C9 ?) as the output for the tilt servos.
Regards Rolf
Hi Rolf,
OK, I use the GCS.
3.8 Beta Firmware. I Don’t have a binary servo, so that one is OK for me.
There is no special reason.
Sebastian