We have slightly optimized our forward transition parameters: Q_TILT_RATE_DN is lowered from 12 to 10 degrees/second and Q_TILT_MAX increased from 55 to 60 degrees. So the forward transition is perfect without substantial loss of height.
@Rolf, I was under the impression from previous posts that the Q_FRAME_TYPE was ignored as soon as the Q_FRAME_CLASS was put to a Tri copter?
@tridge, could I suggest that the description for Q_TILT_MAX be added to, to say that that is the tilt limit of the motors while it is transitioning?
Hello @Pete, could I suggest loading another Firmware to check that it is not, either, the beta code doing something odd or your pixhawk being a bit broken. If it does load up the new firmware and produces normal outputs from the pixhawk then I’d suggest re-loading the beta 3.8 arduplane onto the pixhawk and starting again. See if the problem persists.
How can i perform a ground check of the tail yaw servo? I have my parameter set nearly the same as rolf and i can see it actuate when i change the servo trim. I havent a clue on how to make sure its working correctly before i attempt to maiden.
To my understanding and the way I did it was to switch everything on as one would normally do, however you just don’t arm the motors. With the motors not armed you can increase the throttle without risk of them starting up, for a premature maiden, and operate the rudder as normal. It should physically move the rudder servo in the correct orientation for your rudder inputs.
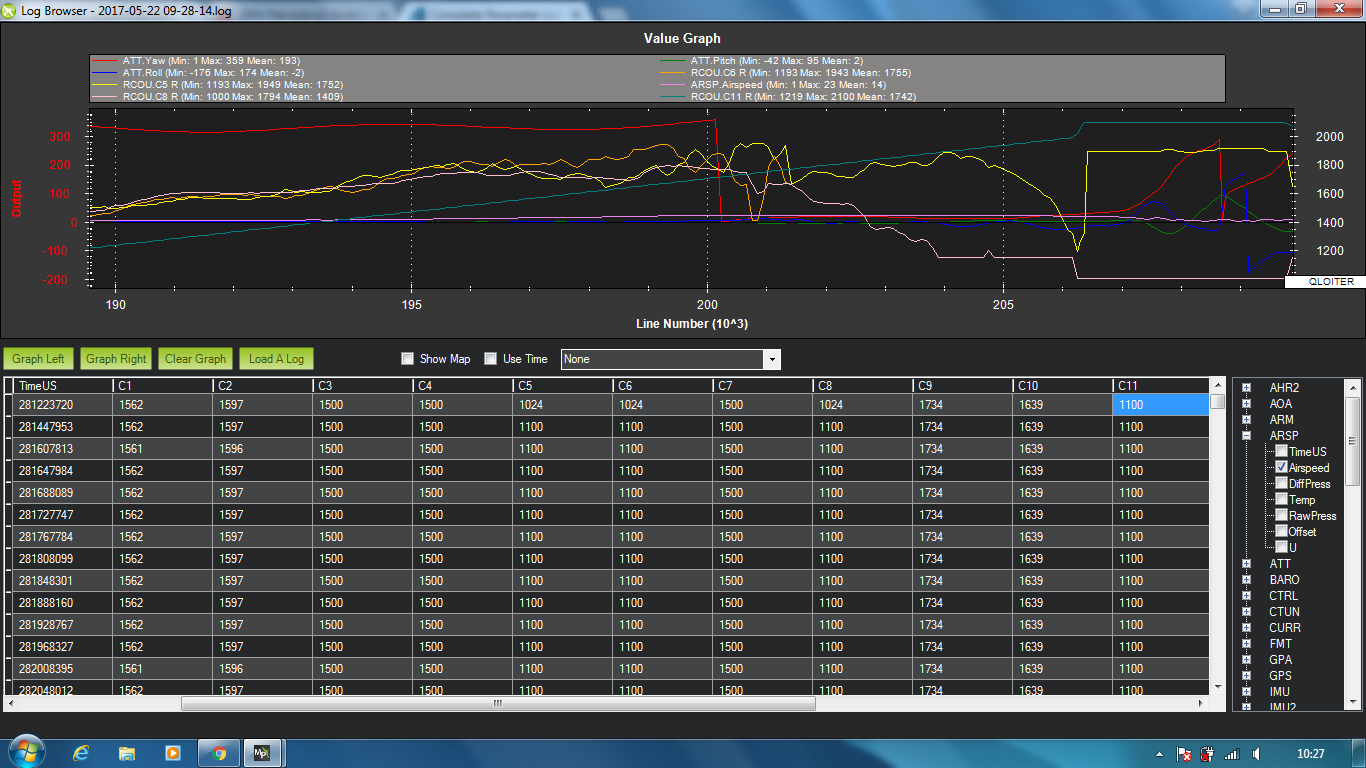
Once again having a little problem with the transition. It appears that once my aircraft reached a the transition speed, it started to throttle down all the engines. Not a bad thing as the aircraft is beginning to fly. However, after the final bit of the transition where it finally shuts down the rear motor, it suddenly and sharply slammed open the taps on the front two motors, not great for a flying wing.
As you can see from the log it cased horrific yawing and rolling which resulted in a rather nasty spin.
@tridge, Is there a reason for the motors to reduce their output towards the end of the transition? Also, I am assuming I can control the rate at which the throttle is applied at the end of the transition by altering the Slew Rate of the throttle?
With the very drastic yawing, I was hoping that RUDD_DT_GAIN would control the yaw when flying as a plane using the two motors on the front for differential thrust. Is this implemented for the tricopter setup?
@DGB-Aerospace
A few things. Before tiltrotor was ‘possible’ with ardupilot, i was using a KK2 board to accomplish this and it worked very smoothly. It differed in that you had to assign servo and motor controls and output for two separate profiles, a hover provile and one for a forward flight plane profile, and then had to assign the actons of each output as you transitioned it. so it was very compliated but made it work very well. now that i am trying to use arduplane, i couldnt understand how the program would know what i wanted it to do and when just by assigning ‘servox_function’ to a motor or servo. and now that its not working at all for me, it only reinforces in my head that i really am missing something here, a few key parameters. my point is, maybe there is a paramter which you must tell the arduplane that the frot motors are to be used for forward flight as well, and not only hovering so that they dont shut off when fully transitioned. I will need this parameter too, as my setup is very similar to yours.
I will try what you recomended and reboot with other software to validate functionality, but when i reload the beta, can you tell me the list of like the ESSENTIAL few parameters that must be changed in order to get your tiltrotor system working?
I wanted to just set the parameters and move my nacelles as i command yaw input to verify proper servo tuning, and have been struggling for weeks to get this one simple goal accomplished. i cant control or move the tilt rotors at all.
Thanks,
Pete
Just had a quick look over the params you posted a little while ago. You have almost the same stuff as me. The only big thing that I saw was that your aircraft is armed as soon as you switch it on? Do you not have to arm it with rudder before hand? This jumps out at me as when the aircraft is disarmed it goes into a “check” mode where you can operate the transitions and rudder with out fear of it taking your hand off.
Also is your q_tilt_rate_dn still 0? That might need to be a positive number to get it to move in FBWA transition.
Also just to double check;
Q_ENABLE 2?
Q_FRAME_CLASS 7?
Q_FRAME_TYPE can be anything I believe…
Motor 1,2 and 4 are on servo5, servo6 and servo8 respectively as 33, 34 and 36?
Front two tilt servos assigned to a SERVOx as tiltMortorLeft and tiltMotorRight (75 and 76)?
From memory this is all I had to put in to the params to get the tiltMotorLeft and tiltMotorRight servos working in the correct orientation. Then I just went through changing max and min pwm’s to get everything pointing in the right direction. That was it I think.
I hope this helps, its all I can think of at the moment but I’ll add to this if I think of something else.
I’ll take a look… are you sure q_enable needs to be 2 and not 1? I didn’t know that. I know that tilt_type needs to be 2 to allow vectored yaw…
And I turned off all the arming stuff because I can’t get the arming to work. I hold the rudder and nothing happens it won’t arm.
As I mentioned I haven’t even gone through initial setup of compass /gyro/accell calibrations. I also don’t have airspeed setup yet or the gps firmly mounted. I’m just trying to get the tilt servos oriented so I can finish putting my plane together. Am I doing it backwards? Maybe all this stuff has to be set up in order for the pixhawk to go through all pre checks and enable servo/ motor outputs? But then why would I get control in Manual mode and not q_ modes. stumped but I will keep fiddling.
DGB did you figure yours out yet? I’m wondering why the motors dropped out in forward flight mode
Q_ENABLE=2 only affects what happens with auto-missions. It means that the waypoints are by default treated as copter waypoints not fixed wing waypoints.
Most people will want Q_ENABLE=1
@tridge your input would help alot.
I played around alot tonight with this. I beleive i have my head wrapped around setup. the motors and servos seem to be functioning properly, EXCEPT still no vectored yaw control. the servo transitions in tilt_type 2 with servo function set to 75 or 76, but nothing happens when i give yaw input…
I tried this setup on my pixhawk 2 board, and got the same result.
any ideas?
Also, the throttle does not ramp up smoothly. when i add a bit of throttle input, it seems to jump from 0 to like 75%. is this related to throttle Hover_learn? its the only thing that jumped out at me…
I’m having trouble getting servo function 39 to work. The tilt servo is not responding at all except to trim param adjustments. Could someone take a look and see what i’m missing? I would really like to get off the ground this weekend.x8_stage.param (16.0 KB)
Hi Gunaveh,
that is a nice airplane. On the picture, the pitottube seems to be too far back (negtive pressure of the wing) and in the turbulence of the right prop ?
Regards Rolf
Hello, Tridge. I am a beginner in Plane in Japan. I am studying at Randy 's ArduPilot School.
I am challenging to replace Pixhawk in EFlite Convergence. I arranged the FC like a photo. Should I put it over?
hi mr.GregCovey
we are students and we are working on our project , we need your help .
first i have upload the cl_84 firmware to qground but i dont know how transition done , could you tell me how it done and which channel is associated with transition , thanks
Look for posts above from “tridge” on January 25 where he had successful CL-84 flights using the APM Plane beta firmware for Pixhawk. He also posted a .param file that you can load into the Pixhawk after first loading the beta firmware. Below are some quotes from his post.
The servo mapping he used was:
SERVO1: aileron
SERVO2: elevator
SERVO5: front right motor
SERVO6: front left motor
SERVO7: rear motor
SERVO9: main wing tilt mechanism
SERVO10: tail tilt servo
Support for Q_TILT_TYPE is now in master along with the other fixes, so anyone wanting to fly a tiltrotor or tiltwing should now just use the ‘latest’ build. For a tri-copter make sure you set Q_FRAME_CLASS=7.
Hi , Greg
thanks for your response , i already know this but my question is how the trasnstion been controlled , is it by changing some parameter or , change from flight mode to another or iam wrong about my way of thinking