that log file seems to be corrupt. Can you check you can read it in MP, then upload a good one if you have it?
Hello all, I too am enjoying the new tilt-tricopter-vectored-yaw-quadplane capabilities of the ardupilot.
My aircraft has 3 tilting motors, two at the front controlling yaw in vtol mode and one tilting motor at the back used for lift in vtol. All three tilt for forward flight giving me a three engine Flying Wing
There are some problems I have encountered:
SERVO7 PWM output goes off the charts when I tried setting as the rear tilting servo. Goes into the 6000 range.
It is currently only controllable in QHOVER while VTOL-ing. However the Yaw will oscillate from side to side. This can be arrested with input from myself but It will continue to do it with hands off the sticks.
My Yaw Q_A_RAT_YAW values are as follows:
Q_A_RAT_YAW_D = 0
Q_A_RAT_YAW_FF = 0.3
Q_A_RAT_YAW_FILT = 5
Q_A_RAT_YAW_I = 0.018
Q_A_RAT_YAW_IMAX = 0.222
Q_A_RAT_YAW_P = 0.059
I have found that the VTOL-ing control of the aircraft is quite dependent on the CofG position. As I move the CofG back on the aircraft I am finding that the yaw, pitch and roll start to become “unbalanced” and hard to control. However I have had many successful flights with the CofG centered between all lifting motors.
Any thoughts on the Yawing Problem I am having would be greatly appreciated.
Thanks,
Dave
Hello Dave,
do you have logfiles from your flights ? Preferably one with cog in the middle and one logfile with your above mentioned issue. Otherwise the search for causes remains speculative.
Our tri-tiltrotor has no problems with a cog which is not in the center of the engines, as long as each engine has enough power to carry the unevenly distributed weight (and the cog is at the right place for plane flight)
Rolf
@tridge
Straight up; Im having a lot of problems and I haven’t even gotten off the ground. i hope someone can address them all.
I’m ready to get the software going for my setup very similar to the Convergence, but I’m running into what i believe to be basic setup issues.
I’m not getting any output control I need for Q parameters. Channels 1 & 2 servos work as control surfaces and are functioning (in FBWA, but not functioning in Qmodes) but the other channels 3-8 are not functioning at all. I have pixhawk on an aircraft similar to convergence with the following plugged into the pixhawk:
Main:
Ch1 Servo for elevon
Ch2 Servo for Elevon
Ch3 Servo Left
Ch4 Servo Right
Ch5 Motor Right
Ch6 Motor Left
Ch7 not used
Ch8 Rear Motor.
Aux outputs are all empty.
As mentioned, I get nothing on Q channels 3-8.seems like the channels are dead. but i know they are putting out neutral signals because the servos snap to neutral when armed… so it must be a parameter I’m missing…
Now, I didn’t do any ‘initial setup’ steps yet, accel, gyro, gps, esc, rc calibrations, reason being this setup is custom so i need to tweak the nacelle servo shafts once it turns on so i know where neutral and both max min positions just like trimming wing horn servo mechanically first is best practice… before i put it all tediously together to do the initial accel/rc calibrations.
i messed around with the arm_require stuff because i thought that might be it, but as it turns out, when i turn all those arm_ params on to ‘1’, i literally cant arm it anymore. it will only arm if i turn everything to 0 and let it arm automatically. i guess cause i never did a cal sequence?
i’d give you a log or bin but i havent even been able to tilt a dang servo yet. so im clearly not airborne,.
In my param list there is no such thing as RCn_FUNCTION anymore. did that get moved to SERVOn_FUNCTION?
also, i set this up as a type 7, since its a tri. and i set the motor number to the servo numbers, 33, 34, 35 to servo 5, 6 & 8. but almost every other time i plug in my pixhawk to mission planner to look at params, there is a ghost 39 that gets populated into a random unused rc channel…
please help me get in the air! @Rolf can you post latest params for that tricopter with tiltyaw you have? i saw it posted but the link is broken
Thanks all! this is a fun work in progress. PS im using EDFs. for the heck of it.
Hello Rolf,
Yes I do, however it seams I inadvertently fixed the problem of it being uncontrollable by just flying it in QHOVER. I guess my piloting skills aren’t good enough for this little beast I’ve created. In QHOVER it does not care where the CofG is. However I do think that you are bang on with the motor power. To begin with I did use a smaller rear motor and all three motors would end up maxed out and the aircraft would get into some interesting orientations.
An interesting thing is that there is still a yawing problem as if there is just not enough yaw control being produced by the vectoring motors. Or not a fast enough response from them to arrest the swinging yaw. It’s very off putting but flyable.
It appears I can’t upload a file of the logs…? I’ll work on it uploading them.
@tridge Hello Tridge, having just tried a transition flight over the weekend I found, to my surprise, the rear motor of my tilt plane turned off for forward flight. Then I though, of course it will, since the Convergence does not have a tilting rear motor. So my question is this…
Is there a way to keep the back motor working in manual for forward flight?
My aircraft is a little heavy and needs all three of its motors for forward flight, I will also need this option for future, much larger aircraft, that I will be building.
Kind Regards,
Dave
@DGB-Aerospace
Maybe you can increase the tilting speed/rate of the tilting servos to better compensate for yaw variations…
Can you share your Params? I cant get any outputs working…
Thanks!
No problem @Pete, here you go,
Tri Copter Vectord Yaw.param (16.1 KB)
Just load it up and compare it to yours I guess.
Just a note on mine, all three motors tilt. So things like the bitmask might be different for mine compared to yours etc etc.
I have at a look for tilting/vectoring speed for the tilt yaw servos but can’t seem to come up with anything that makes a difference other than the Q_A_RAT_YAW_FF param which when increased will increase the speed at which the servos move when controlling yaw, however when increased “a lot” there seems to be some sort of lag that happens. Also the physical config of my aircraft might not be helping, so more experimentation is needed I think.
Kind Regards,
Dave
Our actual parameters (Tiltrotor with 2 tiltable motors in front and 1 rear motor with a yaw-servo - like a tricopter ):
Q_ENABLE 1
Q_FRAME_TYPE 1
Q_FRAME_CLASS 7 (“Tri-Motor Tilt Plane”)
Q_TILT_MASK 3 (only Motor 1 and Motor 2 are tiltable. So the bitmask = 11 , decimal 3)
Q_TILT_TYPE 0 (we have still no vectored yaw contro and typical servos for the tiltmechanics)
Q_ASSIST_SPEED 0 (we have tiltable Motors, so they cant help while flying as a plane)
Q_TRANSITION_MS 0
The following parameters depends on individual plane characteristics:
Q_TILT_MAX 55
Q_TILT_RATE_DN 12
Q_TILT_RATE_UP 80
FBWA_MIN 8 (m/s, at thist airspeed the frontmotors turns completly to plane mode)
The functions of the Pixhawk’s main output pins 1-8 are determined by the parameters SERVO1_FUNCTION to SERVO8_FUNCTION, the functions of the Pixhawk’s auxiliary output pins 1-6 by SERVO9_FUNCTION to SERVO14_Function. The following figure shows our wiring diagram:
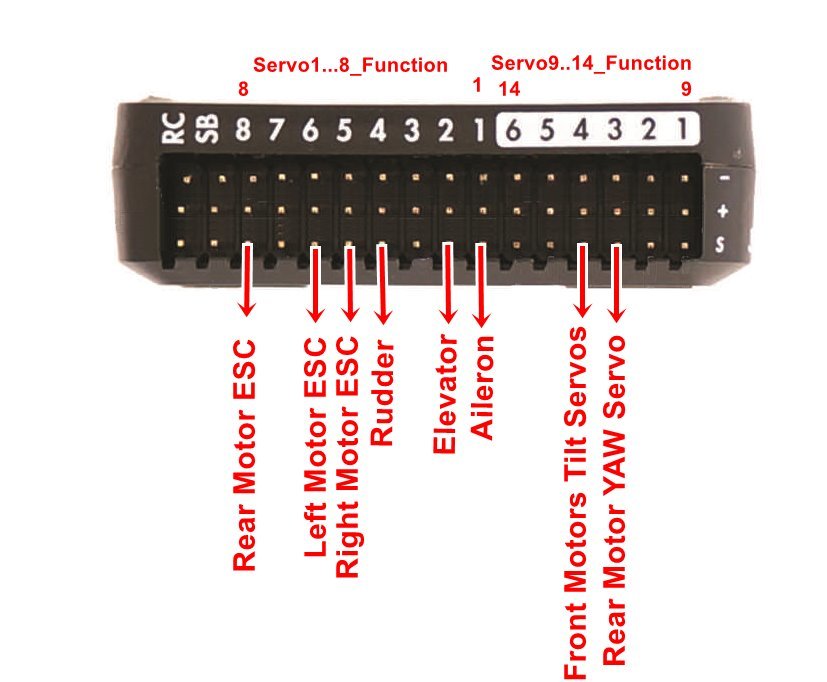
SERVO1_FUNCTION 4 (Aileron)
SERVO2_FUNCTION 19 (Elevator)
SERVO3_FUNCTION 0 (disabled) or 70 (Throttle)
SERVO4_FUNCTION 21 (Rudder)
SERVO5_FUNCTION 33 (Motor 1 = ESC right motor)
SERVO6_FUNCTION 34 (Motor 2 = ESC left motor)
SERVO7_FUNCTION 0
SERVO8_FUNCTION 36 (Motor 4 = ESC rear motor)
SERVO9_FUNCTION 0
SERVO10_FUNCTION 0
SERVO11_FUNCTION 39 (Motor 7 = tail servo for yaw)
SERVO12_FUNCTION 41 (Motortilt = Front motor tilt servos)
SERVO13_FUNCTION 0
SERVO14_FUNCTION 0
We start in Q_Stabilize mode, switching to Q_Hover, ascending to a safe hight of some meteres, then switching to FBWA and the transition starts:
Last sunday morning:
Wish you success
Rolf
3 Likes
Hello Sir …
I’m a student in a group that built a rc plane
We are trying to build a VTOL like yours
if you could tell me how to install the firmware and the parameters on the PX4 please
i’ll be greatful 

Thanks Rolf.
I checked all my params against yours, and DGB’s. i dont see anything wrong. i just have dead Q outputs and i dont know why. almost the same complaint that can be seen here:
Ive messed around with the arming paramters and nothing helps.
@tridge Do i have to go through first time set ups and calibrations for Q tilts to work?
the tilt servos buzz so loud when armed but wont respond to any inputs…
[quote=“Pete, post:312, topic:8805, full:true”] i just have dead Q outputs and i dont know why.[/quote]Did you have calibrated the escs ?
Servo adjustment correct ? (SERVOn_MIN , SERVOn_MAX)
Switching between tilt positions while testing on the bench (without props!!!) is easiest by switching between manual and q_stabilize mode.
Rolf
I tried the ESC cal, only the front two tilting motors get power.
In manual mode, the motors get power, and the tilt servos tilt forward.
In Q_Stabilize, the motors do not get power or respond to throttle, and the servos tilt up approximately 90° but do not move and do not respond to yaw input. here are my params.
VS001-Test Vehicle.param (15.9 KB)
I’m going to try starting from scratch, and then im going to try using your param file just to see if i can get it working in q_stab and tune from there.
It seems like there is one main ‘master switch’ parameter that im missing to get output power while in Q modes and respond to inputs…
[quote=“Pete, post:314, topic:8805”]
I tried the ESC cal, only the front two tilting motors get power.
[/quote]We calibrated with Q_ESC_CAL=1 procedure described there:
http://ardupilot.org/plane/docs/quadplane-esc-calibration.html
Even more confusion. I still have no throttle at all in Q_stabilize or FBWA. only manual. something isnt right.
I think the Yaw Tilt type 2 isnt happy. i will try Tilt rotor without yaw like Rolf just to see if i can get power.
(update i tried tilt type 0, and i still get no power in q_ mode-. only in stabilize mode.)
Rolf any shot you can upload your param file? thnx
@tridge why do i get no power in Q_stab/fbwa? Servon_function 75 and 76 dont seem to respond as they should since they dont respond to yaw input. only transition 90° between stabiolize and fbwa.
Also i know Type 7 means tricopter, but every time i power on the pixhawk, it automatically populates a ‘39’ into a random servo channel and i delete it everyu time and then its back upon reboot somewhere new. which is function ‘motor 7’.
why is that happening?
I must be missing one silly parameter.
Hello all,
Got a little bit of progress with my tilt-tricopter-vectored-yaw-quadplane. I have not got it to start a transition into forward flight… but that’s it. It begins the transition but does not complete it.
Here is a video of the first sucsessful transistion into FBWA and semi forward flight. (Please excuse the shoddy build quality, it was built in a day)
Here is the Log file of the flight : https://www.dropbox.com/s/0fowxc7bllqjej4/First%20Trans%20into%20FBWA.zip?dl=0 (if this link doesn’t work I’ll try something else.)
Here is the current parameters that the aircraft has: Tri Copter Vectord Yaw_5_19 05 2017.param (16.1 KB)
From what I can gather there is no reason that it should not transition. It is reaching the transition speed at a point but then decelerates and stays at a relatively constant 12m/s.
Any help would be much appreciated. It seems we’re so close to having a fully flying vtol capable aircraft its palpable.
Looking forward to what you guys hearing what you guys think. Hope everyone else is progressing better than we are 
Kind Regards
Dave
wow that was some close call… i hope people here will help you out… till then can we see the whole aircraft’s photo… then would be great …
Cheers and Best of luck…
Sure thing, here’s a picture of the little beast.

edit:Also, just had 2 more flights and its the same result each time, it seems to get half way through the transition and then stops trying to accelerate. Rather interesting.
@DGB-Aerospace
Hi Dave,
exciting airplane and film.
I noticed that you have not activated the airspeedsensor ARSPD_USE,0 (should be 1)
Should the engines realy only tilt 22 degrees (Q_TILT_MAX,22) to reach ARSPD_FBW_MIN,18 (18 m/s !) ?
Why Q_FRAME_TYPE,2 ?
At the tiltrotor we have Q_TRANSITION_MS,0
The PID values f0r yaw would have to be adjusted.
Rolf
Hi Dave,
The parameters you’ve set are telling the code not to go past a 22 degree tilt angle until it reaches 18 m/s. That is why it isn’t pushing the tilt forward more. You do almost make it to 18, getting to 17.5 at one point.
You need to lower ARSPD_FBW_MIN. I would guess a value of 13 would be more appropriate.
I’d also suggest raising Q_TILT_MAX to at least 30 to allow it to accelerate more quickly.
Good luck with the next flight!
Cheers, Tridge
@tridge I’ve run into a brick wall I’m not getting any outputs I should be that I set up. Any ideas? Any other key parameters I’m missing ?