Hey,
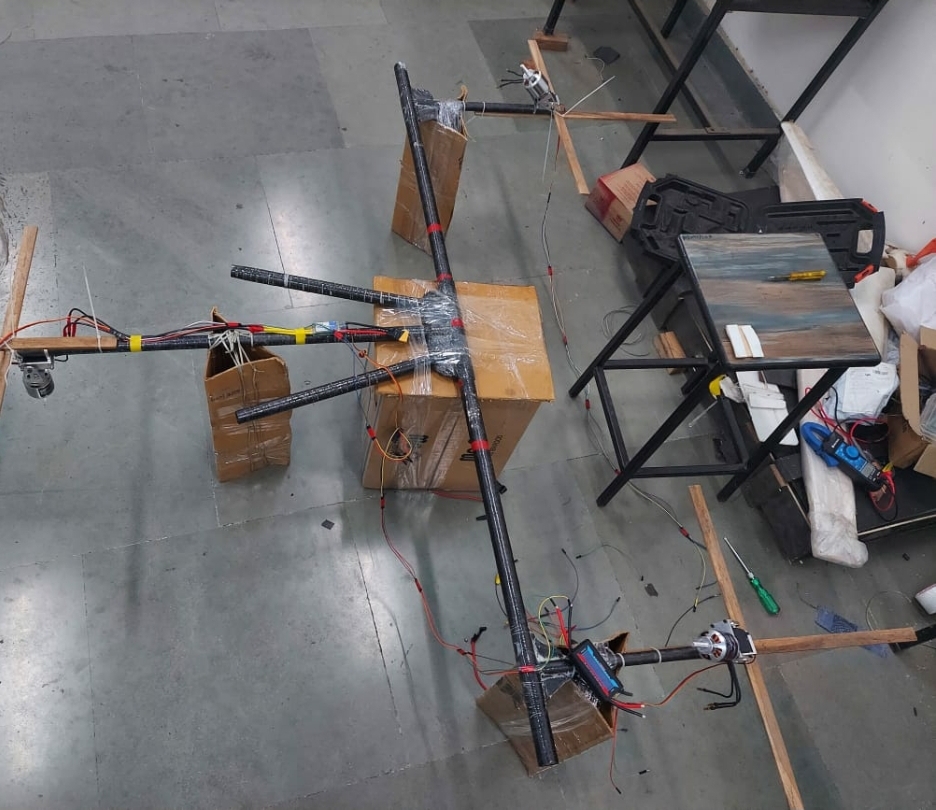
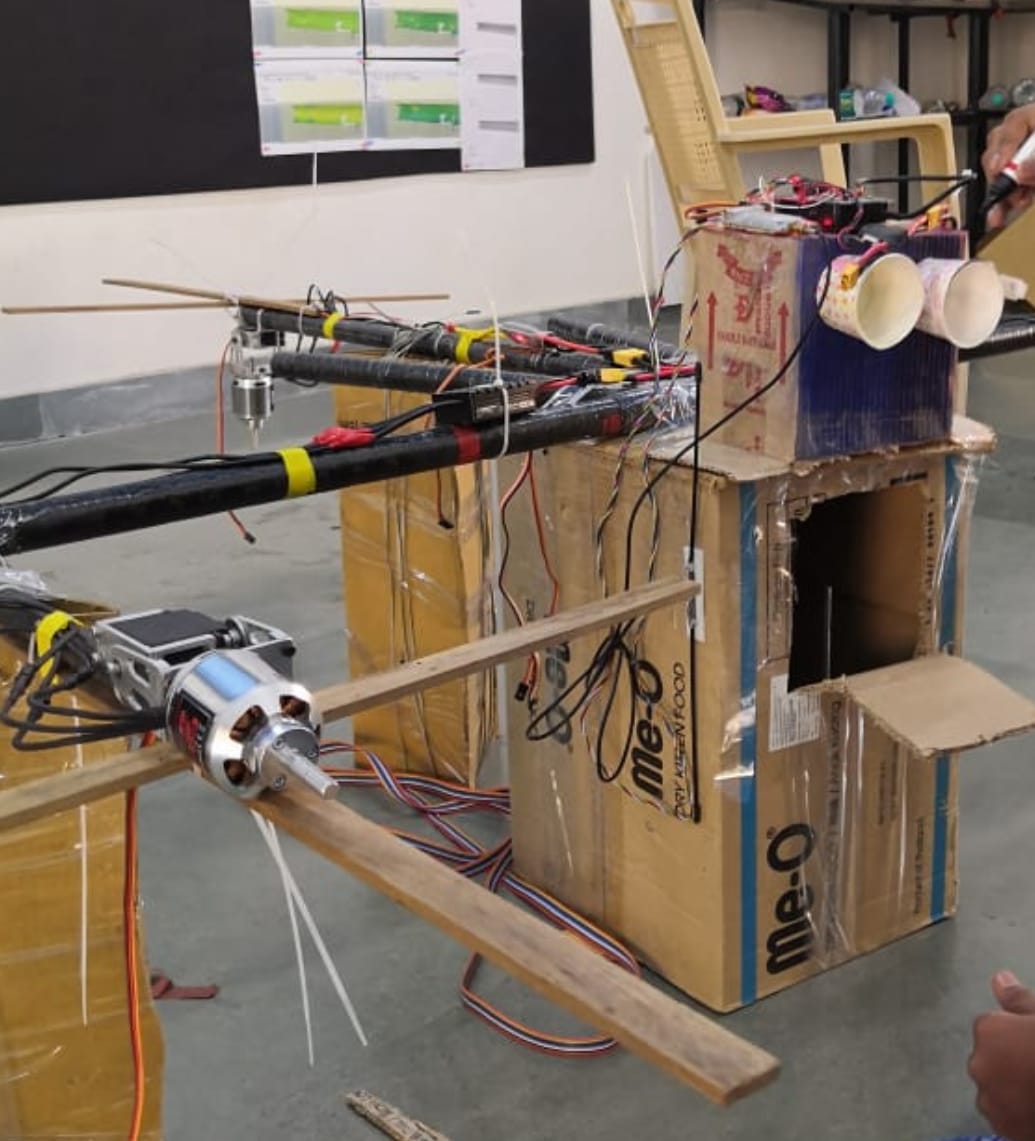
We are working on a Tiltrotor Tri-copter VTOL which has all 3 motors tilting. We are using Mission Planner. Our flight controller is Radiolink Pixhawk and the firmware version is 4.0.8.
Our model is ready but we are unable to have a test fight as the motors are not working in “Q” flight modes.
Manual mode - sometimes the motors work and sometimes it dosn’t and sometimes the servos moves with the throttle.
QStabalize - the servos change the angle but the motors do not work. Same with QHover and QAcro
FBWA - the tilt servos change angle along the throttle. Sometimes the motors work and sometimes is dosn’t.
We tried Q_ESC_CAL = 1, it enabled the motor to work in QStabalized but only temporarily.
We dont know what we are doing wrong. We even tried it with another pixhawk but it had the same results. Same procedures giving different results.
We used the traditional method of setting up the pixhawk which is, calibration of Accelerometer, compass calibration, radio calibration and parameter changes.
The parameters that we changed are
Q_ENABLE = 1
Q_FRAME_CLASS = 7
Q_FRAME_TYPE = 0
Q_TILT_MASK = 7
Q_TILT_TYPE = 2
SERVO5_FUNCTION = 33
SERVO6_FUNCTION = 34
SERVO7_FUNCTION = 0
SERVO8_FUNCTION = 36
SERVO11_FUNCTION = 75 (front left tilt servo)
SERVO12_FUNCTION = 76 (front right tilt servo)
SERVO8_FUNCTION = 41 (rear tilt servo)
can anyone help us solve this.
Attached is the whole parameter list.
It looks like you have a QuadPlane Delta Y3 configuration. I am not certain if having a third tilt servo is a valid setup or you need special firmware from kris. One thing that looks incorrect is your setting for SERVO8_FUNCTION = 36. With a Q_TILT_MASK = 7, I would think that SERVO8_FUNCTION should be set to 35.
Let’s see what @Rolf has to say about the configuration.
Thank you @GregCovey for the reply.
We tried the custom firmware from Kris also. The rear tilt motor seams to be working.
But the main problem is, the motors are not working in QStabalize mode or any Q flight mode. Because of this we are unable to fly it in Copter mode.
Hi @GregCovey
Hi @Umar_Khan ,
I suspect an ESC calibration problem: With Q_ESC_CAL = 1 the ESCs are learned to the throttle channel, in Umar’s VTOL this is RC3_MIN 989 RC3_MAX 2014. In manual mode or FBWA this works of course. In Q modes, Q_THR_MIN/MAX is 1000 and 2000 respectively.
I would change Q_THR_MIN_PWM and Q_THR_MAX_PWM to 989 and 2014 respectively.
The VTOL motors at Tritilts are controlled with ServoX_function 33,34,36.
Thanks, Rolf! Please explain to me again when Q_TILT_MASK = 7, why we are not using the first three motors 33, 34, and 35? How do we use motor 3 (35) in the Q_TILT_MASK?
The numbering of the Moto ESCs is taken from Arducopter. https://ardupilot.org/copter/docs/tricopter.html
I was also surprised at the time and even today I always have to check the parameter files of our Tritilts . At that time, you were so enthusiastic that you didn’t notice it Tiltrotor support for plane
Thank you @Rolf
Thank you @GregCovey
We loaded custom firmware from Kris in a new pixhawk with the parameters of Nimbus 1800. This was not working initially. Changing the values of Q_THR_MIN/MAX worked. By changing Q_TILT_MASK = 7 we were able to move the rear tilt motor.
We had our first flight. The takeoff was stable. The initial plan was to take off for 2-3 feet. But it shot up to around 10 feet, we panicked and tried to land, but it crashed.
The landing gears were temporary, and was designed for 2-3 feet.
Attached is the video of flight and also the log file.
Please review the log and point out the potential problems and mistakes.
Thank you.
That looks interesting! You need to post the .bin file, not the .rlog and .tlog files so we can see the settings.
My guess is that you were in QSTABILIZE mode and perhaps didn’t work the throttle properly. On that kind of structure, you need to have gentle landings. Perhaps on your next test, try the QHOVER mode which uses the BARO sensor to help maintain height when the throttle stick is center. The QHOVER mode desensitizes the throttle stick so you have less opportunity for an “OPPS!” moment.
Umar,
I would like to know if this project of yours has been successful. I’m also working on a Tiltrotor Tri-copter VTOL with 3 motors tilting. I have the same settings as yours except the Q_LILT_MASK=11 ( 3 motors (M1, M2, M4) tilting, corresponding to the Binary “1011”, i.e., Decimal 11 ). However, it doesn’t fly, and take off is very unstable.
Bonjour ZOU, Je travaille sur le même modèle ( VTOL tricopter comme celui de Chris … ) Etes-vous certains de votre paramètre : Q_TILT_MASK=11 , moi j’ai mis : 7 ??? A bientôt
Cordialement,
Robindesbois

 but it is early stage
but it is early stage