This is my last test of the CL-84 before changing the stock controller to a Pixhawk loaded with new Tiltrotor firmware for APM:Plane. The stock ESCs were replaced with faster SimonK ESCs which made the transitions more stable and predictable. There was a fair amount of wind during this test which shows that the CL-84 can hover with control in breezes up to 10mph.
What a fun design!
Edit: Apparently, new users are limited to only 4 replies in a topic so I am forced to edit my 4th reply to add information.
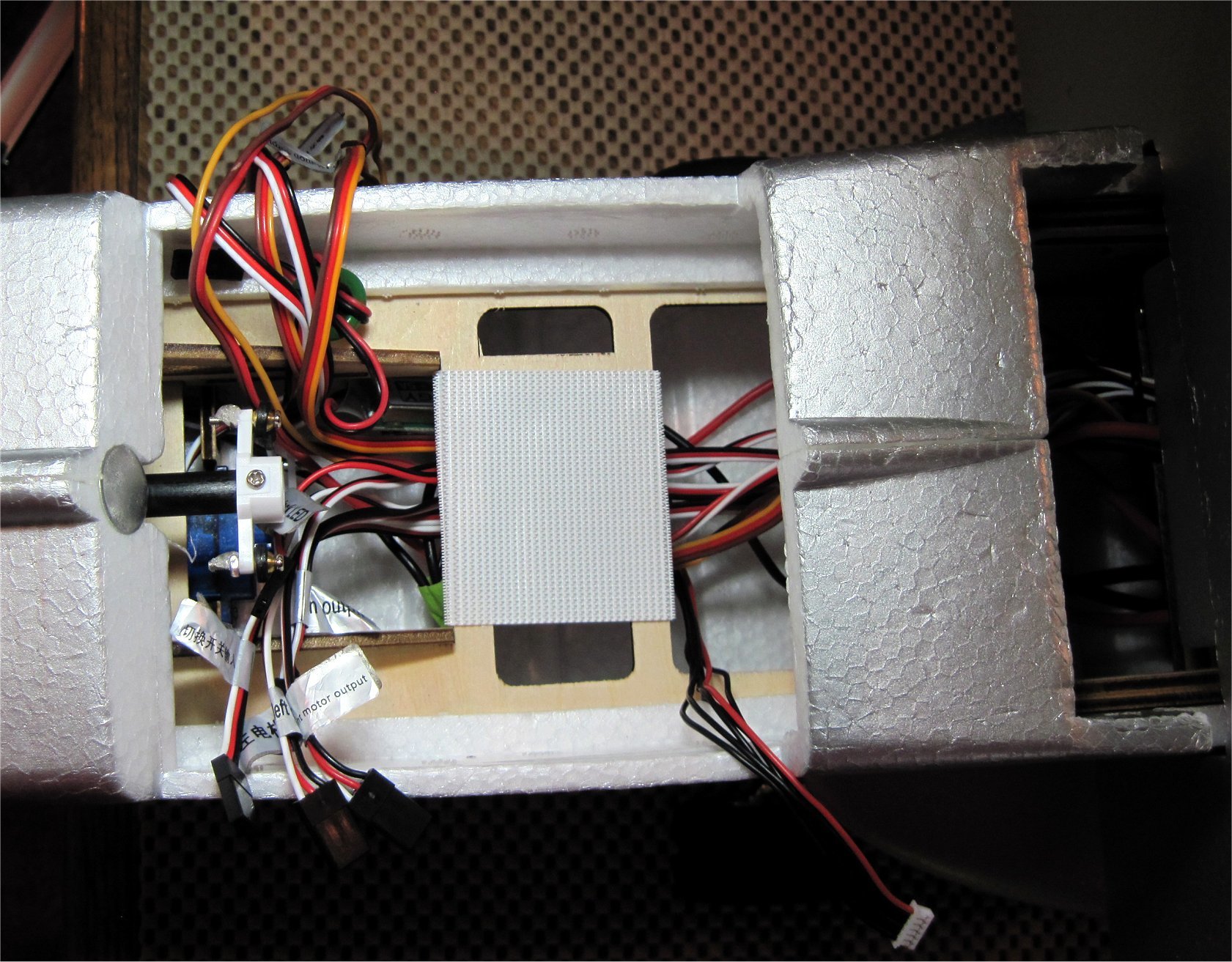
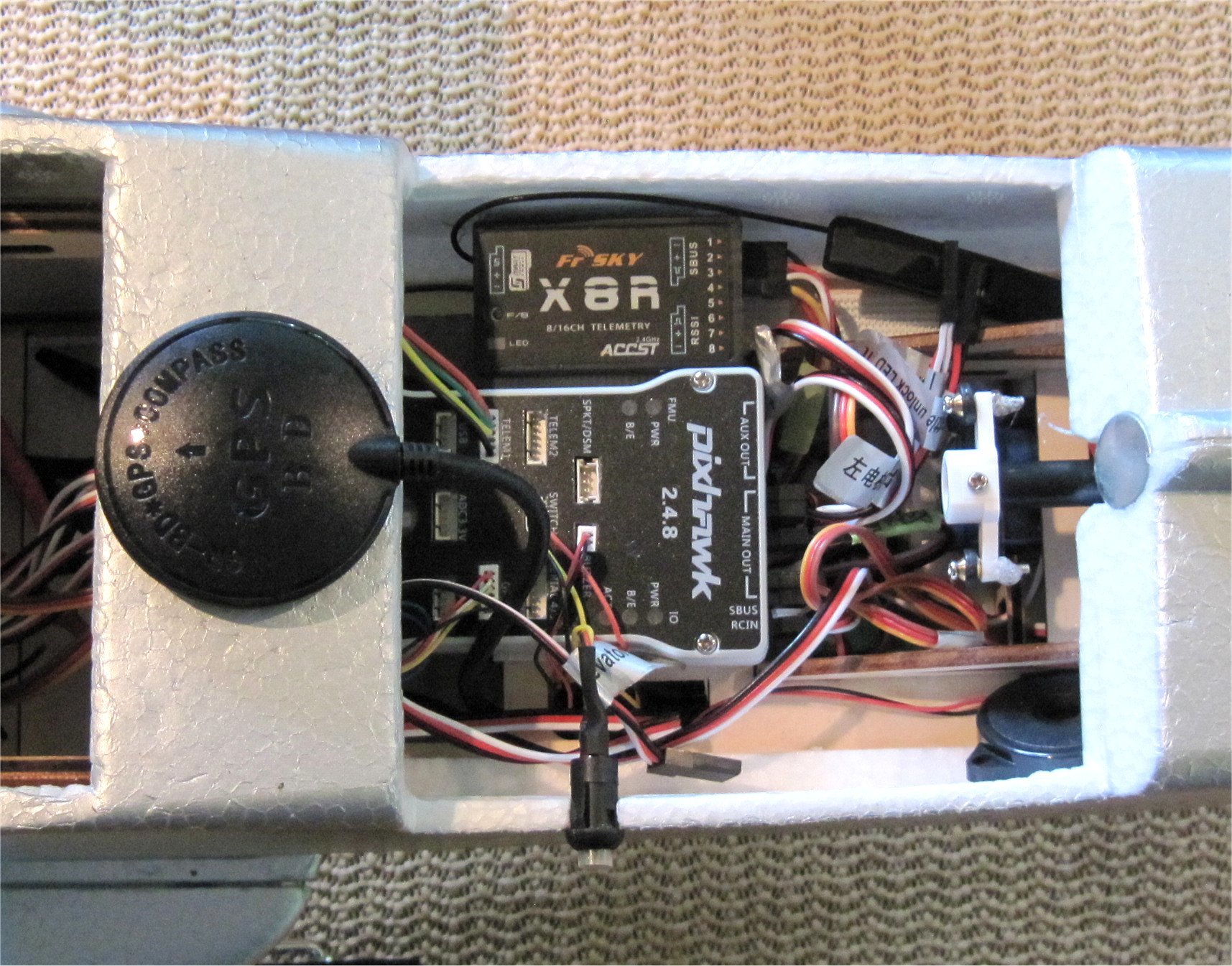
I started my conversion to APM on the CL-84 by removing the stock flight controller and mounting the Pixhawk, GPS, PM, and support parts. I connected my Pixhawk to the FrSky X8R via a single SBUS connection.
I realized that we still need a connection diagram for the following outputs.
- Left main motor CCW
- Right main motor CW
- Tail motor CCW
- Tail motor tilt servo (Yaw)
- Hover/Forward Flight mode servo
- Ailerons
- Elevator
Edit #2: This forum is pretty lame. How do you become something other than a new user if you can’t have more than 4 posts?
I hovered my CL-84 in the backyard using APM:Copter v3.3.3 firmware. It needs some pitch tuning because It’s not a normal tricopter with 3 equal motors but it works first try! What a hoot!
Edit #3: Hover testing with APM:Copter
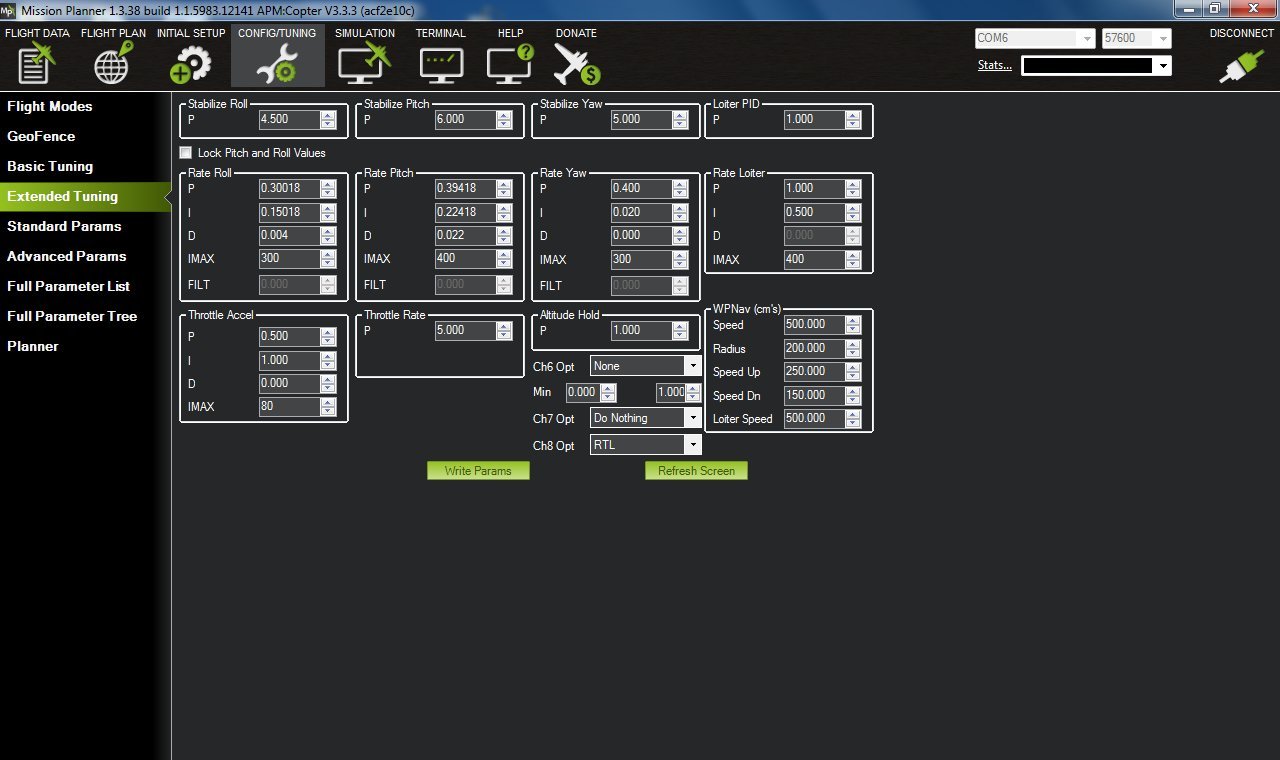
I loaded copter v3.3.3 on my Pixhawk just to play around with how it might Loiter better than the stock controller. I’ve changed some PIDs and got it to work in Stabilize and Alt. Hold modes in light wind. Loiter will be next.
In addition to PID changes, I got a tip that these settings are needed for manual yaw control. Unlike the original controller, the manual yaw control is not active until the motors are running.
RATE_YAW_FILT = 20
ATC_SLEW_YAW = 18000
ATC_ACCEL_Y_MAX = 100000
Edit #4: Pixhawk Installation in CL-84

Edit #5: ARMing LED Indication
Tridge,
There doesn’t seem to be a way to drive the ARMing LED in Pixhawk like in APM 2.x. Maybe you can add an AUX output to drive the ARMing LED of the CL-84.
Edit #6: Initial Testing with Copter v3.3.3
While waiting for the APM Plane tiltrotor code to be enhanced for the CL-84 retract-style transition servo, I decided to play around with APM Copter v3.3.3 on my newly installed Pixhawk. Photos at the beginning of the video show component placement and you can see my telemetry unit is mounted underneath the fuselage.
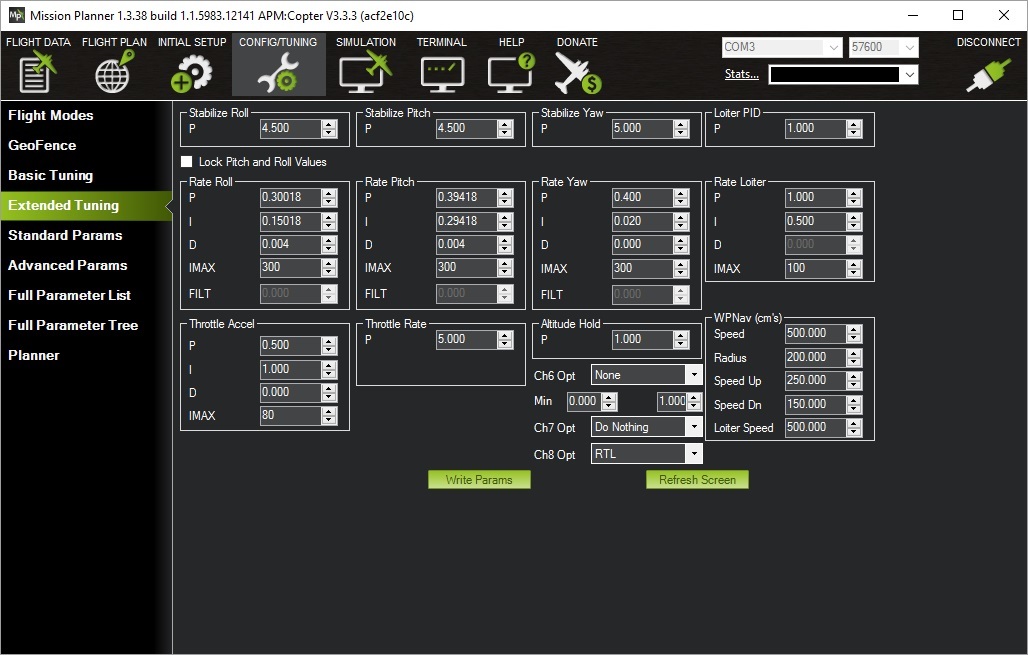
My current PID settings allow it to work in calm conditions but it doesn’t like much wind so I will continue to investigate. It may be good enough to try an Auto-Tune at this point but first I want to check the Throttle-Mid and Vibration readings. Fun stuff!

Edit #7: Test #2 with Copter v3.3.3
I have my PIDs tuned better for wind now. I’ll wait for the new APM Plane code to be ready for the CL-84.