Hello, I’m new to this; so please excuse (and/or offer corrective advice for) any newbie mistakes. I’ve designed and now am building a Y6 VTOL, the basic idea being that the back two motors (motors 3/4 of the “New” Y6Bmotor configuration) rotate from the upward thrust position when in multirotor mode to the lateral (pusher) position when in the plane mode. At that time, five of the six motors (motors 1,2,3,5,6) turn off, leaving only motor 4 in operation. Also, I plan to use a variable trim control on the rotation servo to act as the elevator when in plane mode.
My question is, what would the Q_TIL_MASK parameter? Below is an excerpt from that section of the WIKI. I can’t seem to decipher the code that leads to the parameter value. Can anyone give me a little more insight as to what those numbers actually represent, so I can figure out what they would be if only the back two motors (motors 3 and 4) tilt?
“The most important parameter for a tilt-rotor is the tilt-mask, in the Q_TILT_MASK parameter.
The Q_TILT_MASK is a bitmask of what motors can tilt on your vehicle. The bits you need to enable correspond to the motor ordering of the standard ArduCopter motor map for your chosen frame class and frame type.
For example, if you have a tilt-tricopter where the front two motors tilt, then you should set Q_TILT_MASK to 3, which is 2+1.
If you have a tilt-quadplane where all 4 motors tilt, then you should set Q_TILT_MASK to 15, which is 8+4+2+1.”
for a Y6B with the rear motors tilting the Q_TILT_MASK would be 12, which is 4+8.
It isn’t quite what you want though, as your description has clockwise rear motor turning off in forward flight. The current tilt-rotor code assumes that all motors that tilt also provide thrust in forward flight.
We could add a parameter for which motors provide forward thrust, but I’m curious first of all why you don’t use both rear motors in forward flight.
Could you post some photos of the plane?
Thanks, Tridge, for answering my question. I still don’t understand the formula, but that’s OK.
The reasoning behind having all but the one motor turn off is so the aircraft will then function like a standard pusher plane using only one motor/prop, which, I think, would require less battery power than running both motors 3 and 4. My first thought regarding which of the two motors would turn off, is that using the lower motor (motor 4) as the pusher would be more efficient, in that it would then be the backmost motor; therefore it would not be trying to push air through the prop of another motor, as would be the case if it were the other way round. Of course, then you have to consider the effect of the propeller in front of. So, I’m not 100% settled on which one to use and am certainly open to suggestion.
Any help you might provide regarding the added parameter to dictate which motor provides the forward thrust is very much appreciated.
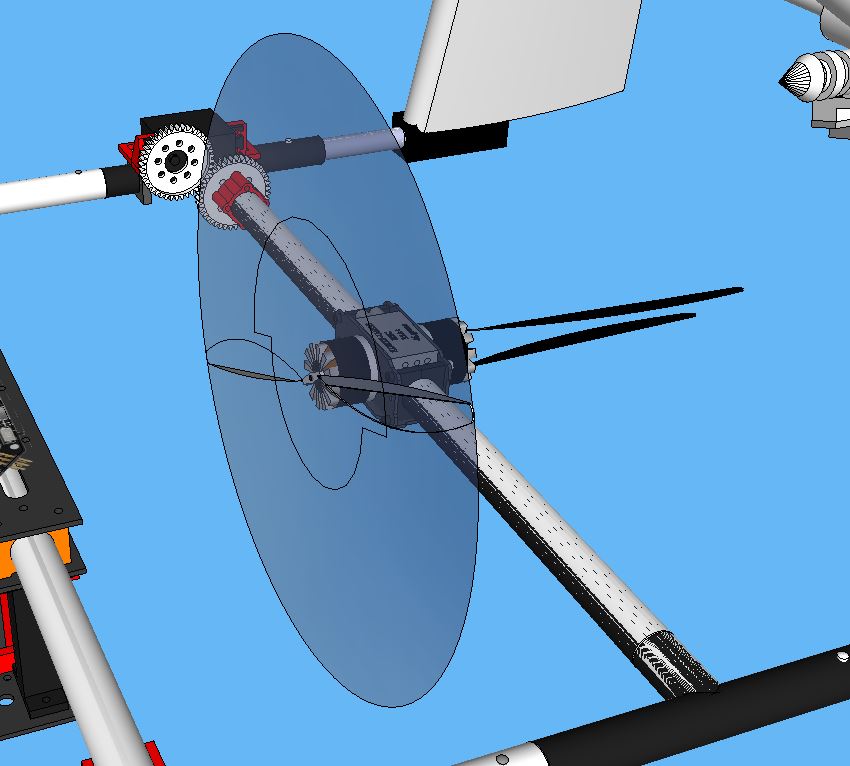
Below is picture of the plane. The electronics are not installed at the time of that photo, but it gives a good overview of the concept.
thanks for the photo - looks nice!
I actually suspect you’ll be more efficient with both props running. When you run a single prop close behind a unpowered prop then you tend to get the unpowered prop turning anyway (unless you have a brake in place), and that will sap energy. I don’t know for sure though, so you’d really need to try it.
I suggest you get it flying initially with both rear props running, then I can provide some test code for you for running just one of them, and if it is a significant advantage we can add the parameter.
Sounds good. Thanks.
I’m also looking at the possibility of using motor 3 as the pusher, with motor 4 having a folding prop that would allow it to feather in the prop wash of motor 3. But I’m not sure the folding prop idea works in the “upward” direction, relative to the motor. If it would work, it would look something like this: