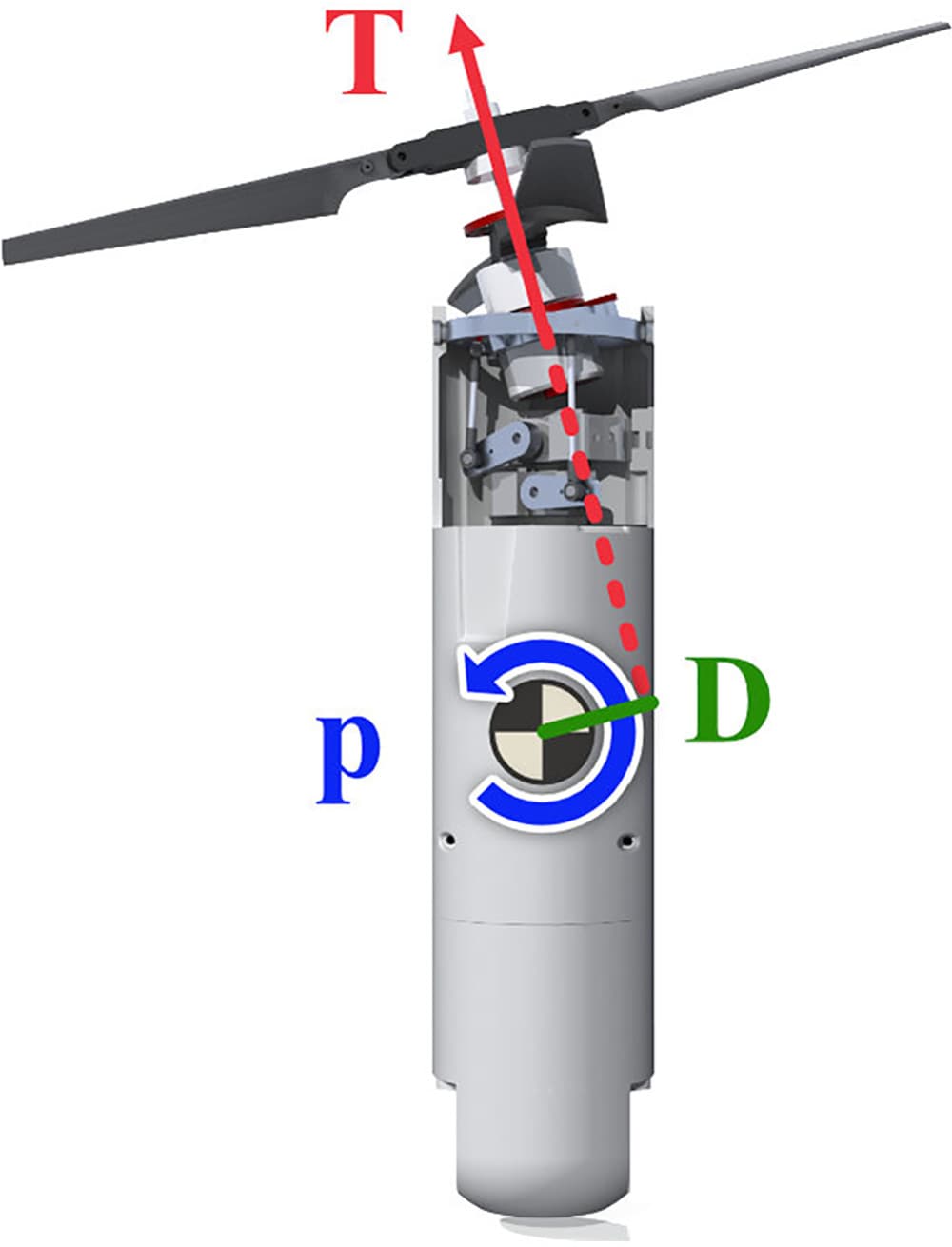
As shown in the picture above, I would like to control the Thrust Vectoring Coaxial Helicopter in Ardupilot.
Does anyone know any information about the parameters that Ardupilot can control?
*Specifications
Control the direction of the trust vector using two servo motors
Create coaxial inversion thrust using two motors
Control the yaw axis by controlling the two motors in opposite directions
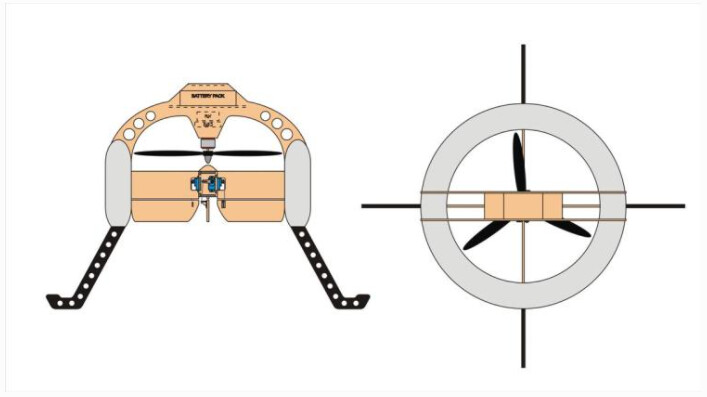
This is just the Coax Copter. You would use your tilting servos instead of the vanes to control pitch and roll. So you could just use the set up for the coax copter. I would think this would be pretty straightforward.
The shape doesn’t matter. Just the method used to control the 4 axes. Coax copter uses the vanes to control pitch and roll, differential torque between the motors to control yaw and thrust on both propellers to control the vertical axis. I suppose it could be using the vanes to help out with yaw but you will have to look at the wiki to see if it does.