Hi everyone!
I want to determine the function that describes what thrust is produced at which throttle, for my particular UAV.
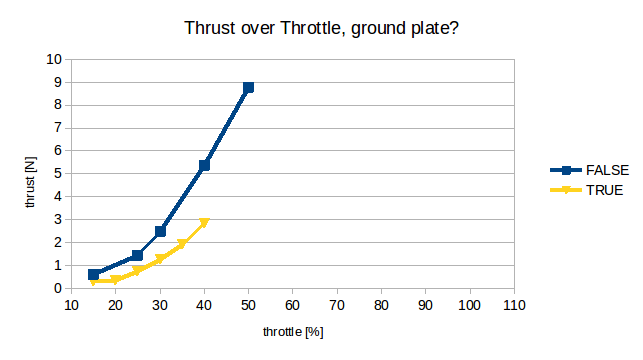
Therefore I set the UAV to perform a certain throttle, and measure the thrust it produces. For now, I used the Motor Test of MissionPlanner. The curve I got so far is highly non-linear (regression: thrust / N = 0.001032 * (throttle / 100%)^2.302). As motor thrust scaling (https://ardupilot.org/copter/docs/motor-thrust-scaling.html#motor-thrust-scaling) is performed with MOT_THST_EXPO == 0.5, my gut tells me the curve should not be that non-linear. So my first question is:
- If MissionPlanner’s Motor Test routine is performed, does ArduCopter apply Motor Thrust Scaling?
An alternative approach would be to arm the UAV and put it into STABILIZE mode. Then I would slowly increase the throttle and measure it.
Hence my other two questions:
- Is there a way to immediately show the actual throttle value at MissionPlanner’s HUD?
- Is the log entry
CTUN.ThOthe throttle value I’m looking for (the value after motor thrust scaling)?
Yours,
Peter
PS: I have a quadcopter (X-configuration), ArduCopter 3.6.11, MissionPlanner 1.3.68
 The blue values (label “FALSE”) are the relevant ones.
The blue values (label “FALSE”) are the relevant ones.