You don’t want default. Connect to Mission Planner, select Alt>A enter the requested values and then set these as noted.
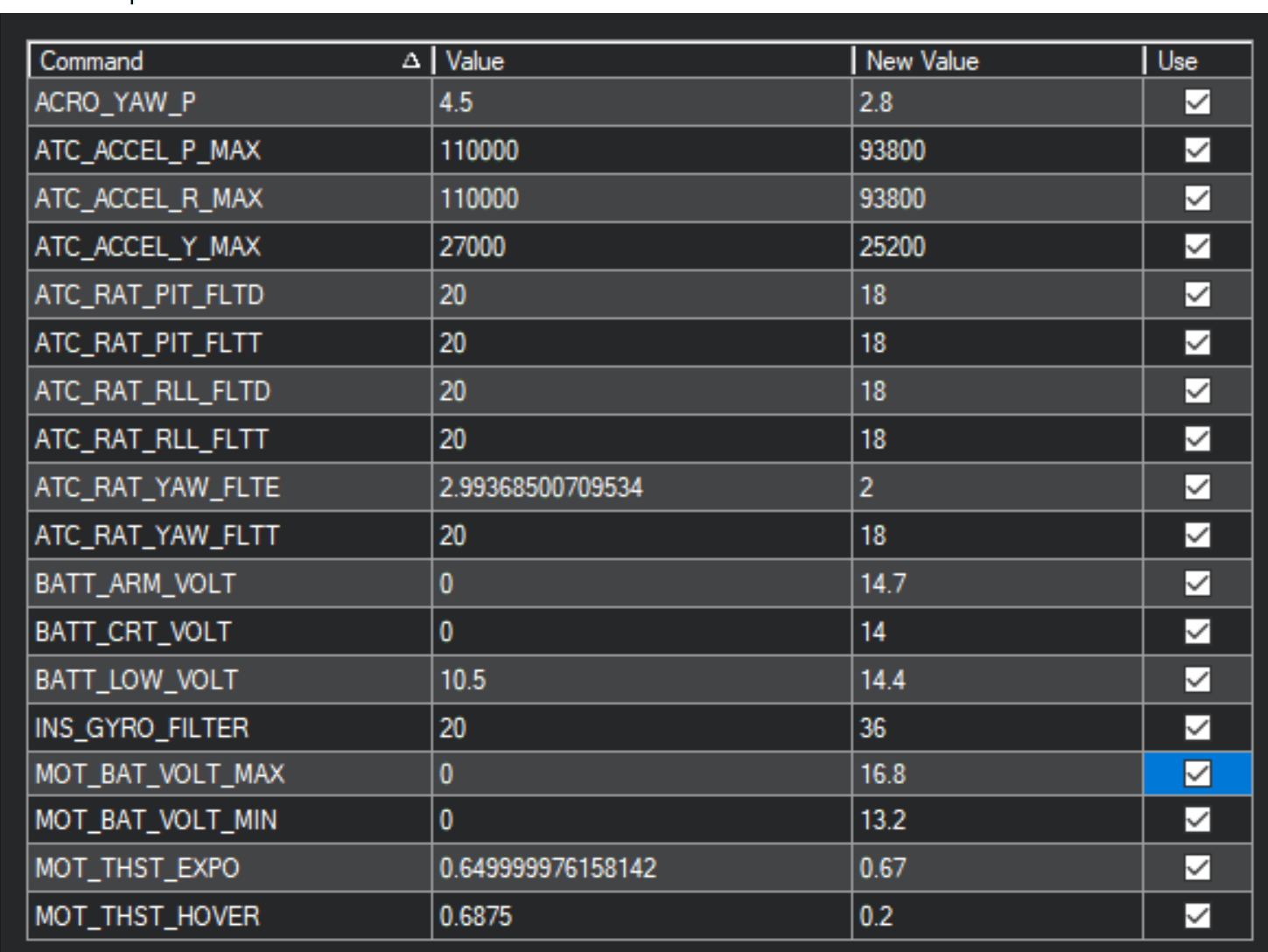
The values are zero by default! If I accept this, the values of MOT_BAT_VOLT_MAX and MOT_BAT_VOLT_MIN will change to 16.8 and 13.2 respectively!
It will along with all of the other parameters shown there if they are checked. If you don’t want that just note the values and change them manual.
I am happy with the value and I afraid to change them!
You need to only change the MOT_BAT_VOLT parameters.
Hi Dave,
I perform two tests with my two batteries today with no problem:
1- 4s, 10000mA, 25C
https://drive.google.com/file/d/1wEaAZWecidC-rjKXriOh2Vo50VOwvAgJ/view?usp=sharing
2- 4s, 16000mA, 15C
https://drive.google.com/file/d/1xE2L2OZ07mYB3UkDGUqVr3QMk08wjAmf/view?usp=sharing
My mission was performed in different place (different mission). Although, the mission was performed successfully, I saw the “Thrust loss check error” on the log file!!! what is wrong? my copter it too heavy? I have to use a lighter battery?
So sorry Dave but I am confused.
You suggested to set MOT_BAT_VOLT_MIN and MOT_BAT_VOLT_MAX to zero. But they are zero and do not need to change them based on the attached figure. If I change them, the MOT_BAT_VOLT_MIN will set to 13.2 and MOT_BAT_VOLT_MAX will set to 16.8!!!
I wasn’t suggesting you set them to zero I was highlighting the fact they were and they need to be set to their proper values.

Thank you so much, Dave. I will change them and perform a new test ASAP.
These parameters are suggested but they will not fix your problem. As I posted preveously your craft is under powered/ overweight.
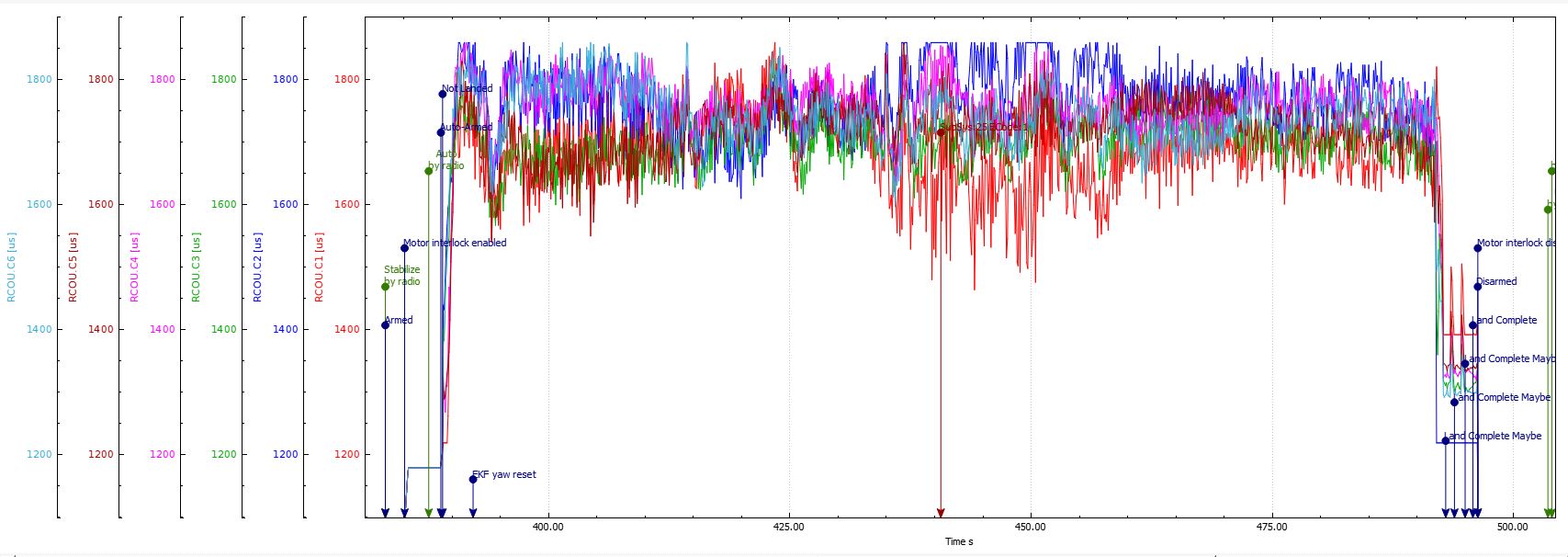
Log 191
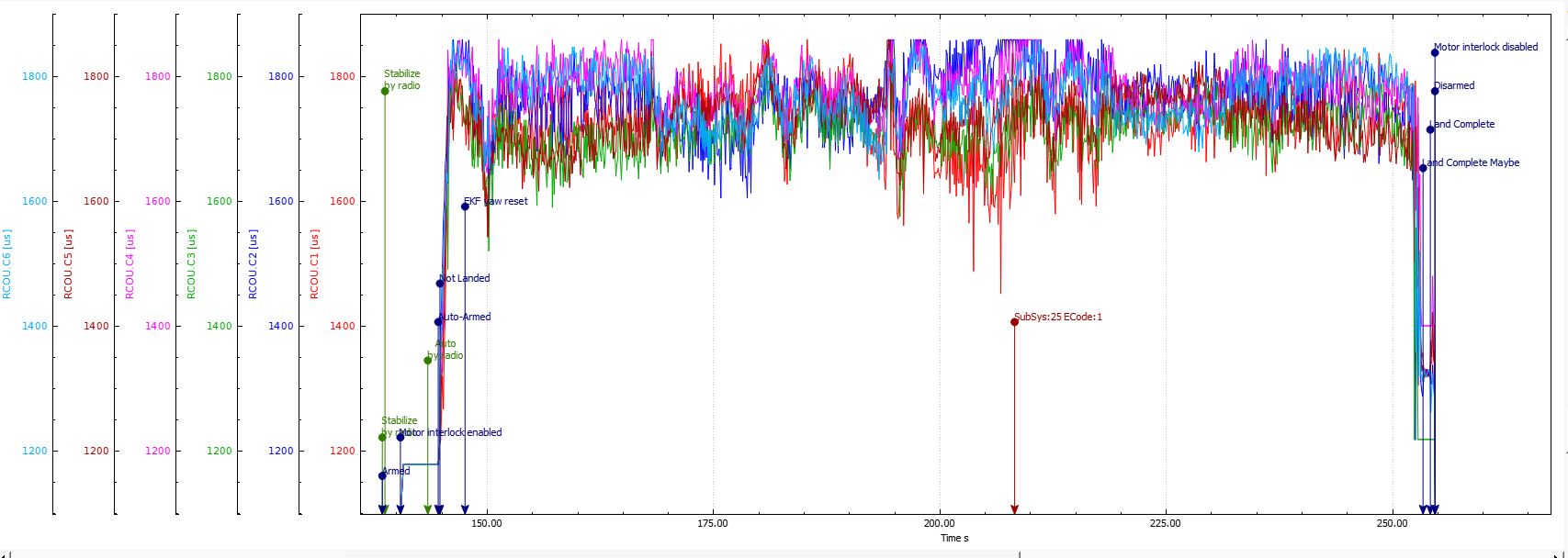
Log 192
I asked for the components and your take-off-weight (with battery) to determine if you have a fundamental thrust:weight problem. You didn’t provide that information so the simple answer is the craft has to lose some weight.
My craft has this specification:
weight without battery: 2400gr
4s, 25C,1000mA battery’s weight: 1028gr
4s, 15C, 16000mA battery’s weight: 1295gr
6 motors 3506, 650kv
propeller: 12*4.5 APC
frame: full carbon 650 Tarot iron man
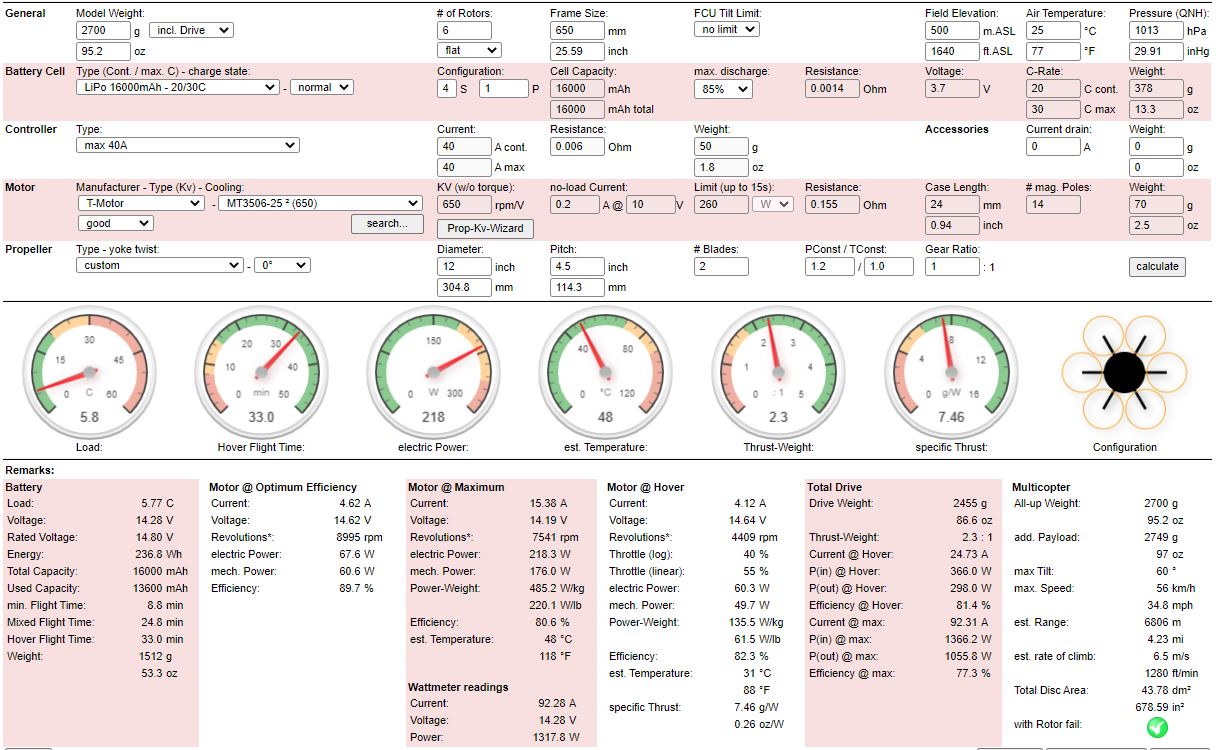
It’s too heavy by quite a bit. Here you have thrust:weight at 1.7:1 with a Hover throttle of 66% with the large battery:
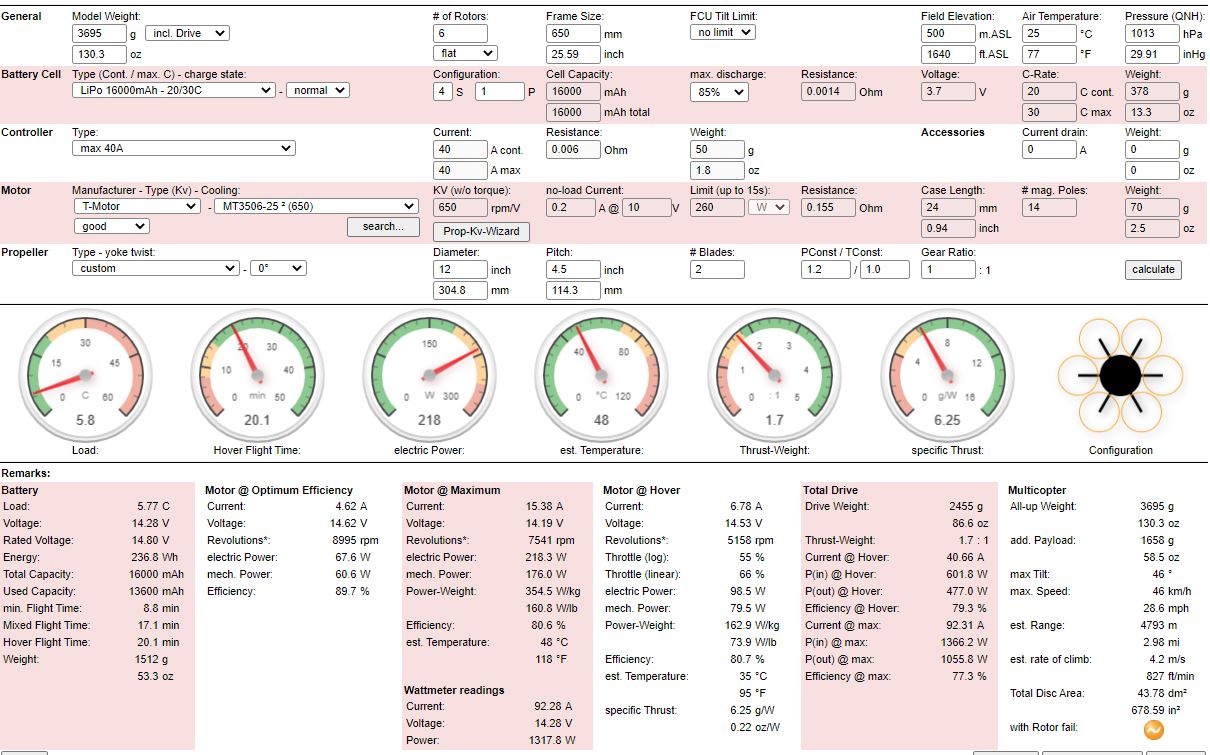
This is about where you should be @ 2700g: (50% Hover throttle is ideal)
You probably should have built this craft for 6S power.
My question still is open. Why my mission did not start and I had thrust loss check but when I changed the mission the copter performed the mission successfully? If my copter is heavy, it is heavy in both test. Although, I had a numerous fly with my copter without problem.
Maybe your problem is related with this Violent takeoff in auto mode and the drone detects the thrust problem and it don’t give you continue the mission. But anyway as @dkemxr told you, you have a problem with the total thrust and the average PWM of your motors that must be solved.
I just setup my first QUAD 450 using Ardupilot. I hade some successful hover on Stabilized mode and was very happy. But after some flights, I put a newly charged battery but this time the copter blades will spin but it does ot lift off. It looks like it does not have enough power. I thought I should have made a wrong settings so I reset the flight controller to factory default values and started all over again. But this did not solve the issue. The copter still will not lift off the ground. I have uploaded the log for reference in a google drive under this link
https://drive.google.com/file/d/16MMz74L8exMFbLLi9_7NzOe0ISMfe7Nd/view?usp=sharing.
Hoping to get some help to fix the problem.
The motors are A2212 13T 1000KV and the ESC’s are 30A. The flight controller is a Mini Pix. Battery is 3S 3000mAH 40-50C. Propellers are 10x4.5.

The battery is sagging to 9.2V on the intial take-off attempt. That’s not going to work…

BTW-Those are terrible motors to start a new project with. Likely same for the ESC’s if you bought them is some kit-o-cheap parts.
Hi Dave,
Thanks for identifying the root cause. Looks like I need to learn how to read those graphs. Is there a document somewhere that explains what they represent. The graph names are abbreviated. I am hoping a document exist where their purpose/function is explained.
Regarding the ESC, motor and propellers, yes I bought some cheap parts to start with. I think I am liking this project. Are you able to recommend a good make/model. And what battery specification can support the quad?
Thank you very much for your help.
Regards,
Carlou
From the log browser mouse over the data field names and the description is shown on the lower right. But you will have to gain some experience working with log data beyond just knowing what the description is. Re-produce what I graphed as a start.
I would replace everything but the Flight Controller at some early point or it will just be frustrating. You don’t want collet prop adapters, you do want BLHeli32 ESC’s, and you do want a more rigid frame than those plastic F-450 noodles.
I don’t know where you are to suggest buying options.
Hi Dave,
Somebody gave me the drone shown below. but the flight controller is broken. I have also attached the specs of the other parts. Do you think its worth using this drone? The form factor of the Mini Pix will not fit the frame. Is there an H7 flight controller that will fit the frame (30.5mm x 30.5mm) and is also supported by Ardupilot? I’ve checked the supported hardwares in Ardupilot website but those listed are big.

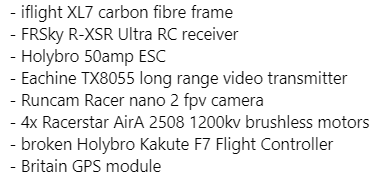
Thanks again for the help.
Regards,
Carlou
Yea, I would go with a Matek H743-Slim.