Hi,
I have a large octa, almost average motor at hover is high and sometimes Thrust Loss Check error will happen.
I will solve it, but I want when this error occurs now,
If the copter cannot follow the commands (Roll,Pitch,Yaw), don’t change the state of motors and don’t execute this commands. I just want keep stability.
I hope i have been able to express my intent.
Thanks
Post a link to a .bin flight log where this happened.
Unfortunately in last flight i was testing geofence, suddenly vehicle got out of my control and it went around and crashed. I gave pitch but it didn’t effects and went itself.
It’s very important for me to find the reason.
Thanks 
Log file: https://gofile.io/d/TlgtlU
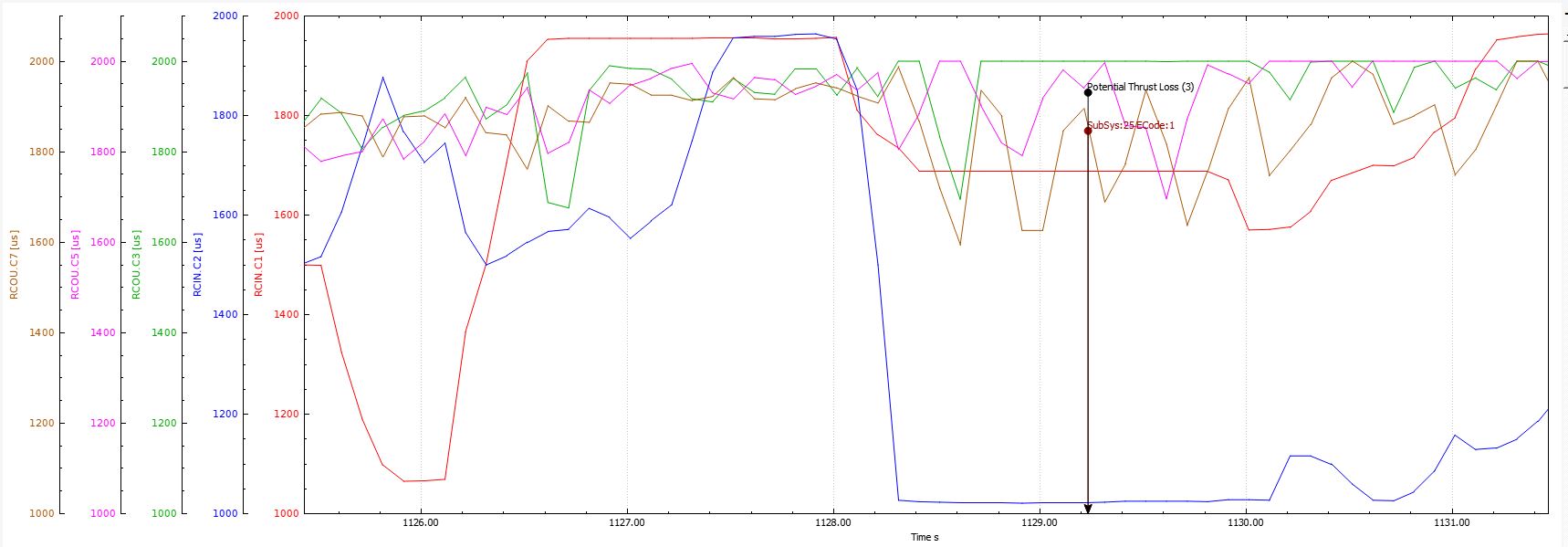
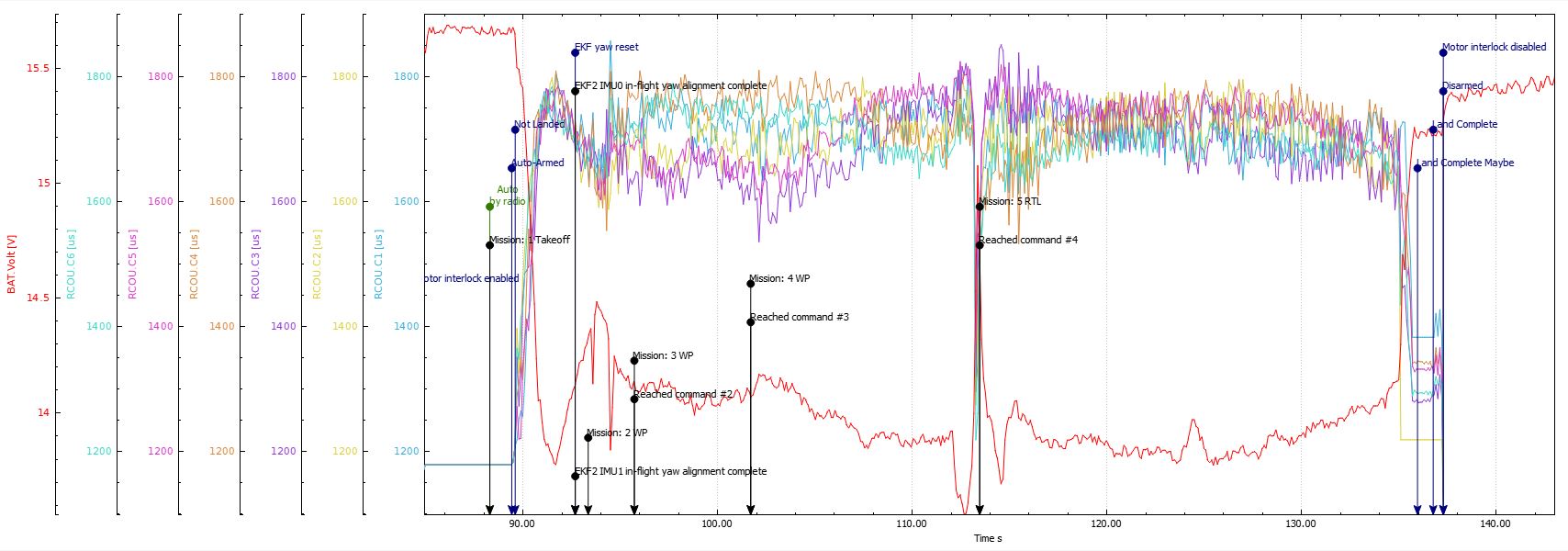
This craft at hover has an average PWM output of ~1800µs so under powered/over weight:
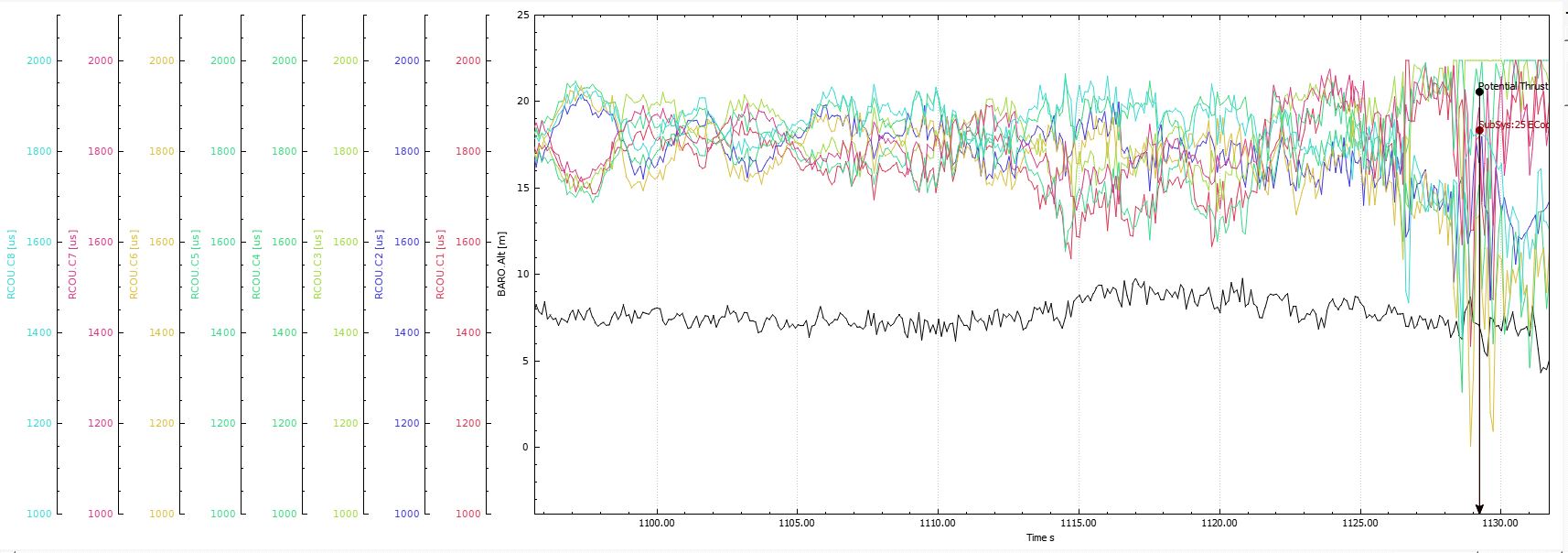
There is no headroom for stability when you command an RC input. Look at these RC outputs go to max with Pitch and roll inputs:
Thanks dear Dave, Do you have any other suggestions besides losing weight?
You need more powerfull motors with larger props (if your frame permits). Do your motors run hot? (ie, after flight are they very warm?) if so, your motor / prop combo could be bad.
Another fix could be to use a battery with a higher voltage rating (more cells) if your esc and motor combination do not mind.
Have a look around for the thrust data stats of your motor/ prop combo and then you can find the optimal setup.
[edit] have you noticed how much current it draws when hovering? you could be pushing esc / pdb limits there too.
1 Like
Describe the components on the craft and it’s all-up weigh (incl battery). Motors, props, ESC’s, frame size. You are running 6S now so I suppose 12S may be too high for the components (ESC’s, motors) you are using but let’s see.
2 Likes
Thanks for Your segestions 
Dear friends,
After many successful flying in auto mode with my Hexacopter today when I went to Auto mode my copter take off but did not perform the mission!!! I read the log file. There is also Thrust loss check.
I do appreciate any help or suggestions.
logfile link: https://drive.google.com/file/d/1WLtBCuHVufuAXYuKuu6yFjrKq3md4d-5/view?usp=sharing
If you read the log file you must have noticed that Motor 4 is commanded to Max and Motors 2 and 6 are close to it. There is a large motor imbalance, your battery sags ~2.V on take-off and you have general lack of thrust or it’s overweight.
What does this craft do when it’s simply hovering?
And set these:
MOT_BAT_VOLT_MAX,0
MOT_BAT_VOLT_MIN,0
Hi Dave,
Thanks for your quick reply.
My mission start with take off-a number of way points-return to the launch. After arming I go to auto mode then increase the throttle and the copter run the take off command. Do I need to increase the throttle stick of my radio a little more ? I think it was at the mid or 50% that it started to run the take off command.
That won’t matter, some of the motors are commanded to max which will not allow the craft to take stabilizing action, that’s why the thrust loss error was registered. It’s under powered/over weight or maybe your battery is shot. What battery do you have?
My battery is a 4s, 16000 mA from Tattu.
Today the weather was cold. I have never tested my copter in such a temperature. How much it can affect on functionality of a battery?
How cold? If it’s one of those 15C batteries it shouldn’t have any trouble supplying the ~45A shown here. Describe your crafts components and it’s take-off-weight (with battery).
Maybe 10 C.
Yes, it is 15C. I have no problem till today with my craft. I have flown many times with my craft in auto mode. In a test, I could hover my copter for around 30 minutes with no problem using this battery!!!
That’s not cold. I fly here when it’s 0C and below w/o too much trouble. Not sure what else to suggest. Do you have an older flight log? Interested to see if the MOT_THST_HOVER value has changed. It’s 0.5 now.
https://drive.google.com/file/d/1EY-RD87_8-hhQf5ds3TYNa-w6NG4gSZW/view?usp=sharing
https://drive.google.com/file/d/1MLatTC8qBUGgarh52xfQcEQyKp7rhORo/view?usp=sharing
It’s similar in this log with the average motor outputs too high even with no speed. It wasn’t commanded to max as in your other flight so no thrust loss message but it’s not right. Do you have another battery to try? Did you set the motor scaling parameters as suggested?
Yes, I have. I will try with my second battery and send you the results.
I do not change the motor scaling parameters as they were zero by default.