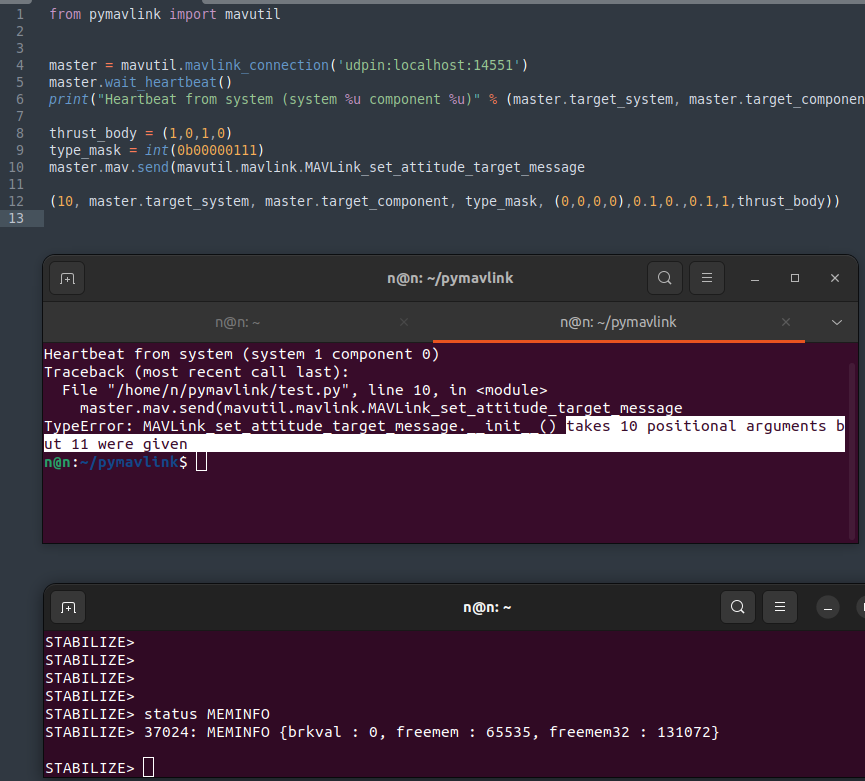
Based on this link I wanted to set 3d thrust vector via pymavlink
But I get error
But what’s most interesting in file *pymavlink/dialects/v20/ardupilotmega.py line 12067
return self._pack(mav, self.crc_extra, self.unpacker.pack(self.time_boot_ms, self.q[0], self.q[1], self.q[2], self.q[3], self.body_roll_rate, self.body_pitch_rate, self.body_yaw_rate, self.thrust, self.target_system, self.target_component, self.type_mask), force_mavlink1=force_mavlink1)
does not imply thrust_body