Hi all,
Today I changed my 300kV motors for 360kV motors on a fairly large X8 copter (which has done more than a hundred good flights already). I kept the same props (18x5.5) and only changed the motors. On the first take-off in (AltHold mode) the drone climbed about a meter and for a second or two seemed okay, but then started swaying from side to side. I could land it without damage but would like to know what went wrong.
My first thought was that it could be that the hover throttle is way off, as it was last flown with the 300kv motors and carrying an additional payload of about 1kg. Anyway, I looked at the logs and it looks like the throttle maxed out for some reason. I checked afterwards and all motors are still working. Below are the throttle and altitude plots:
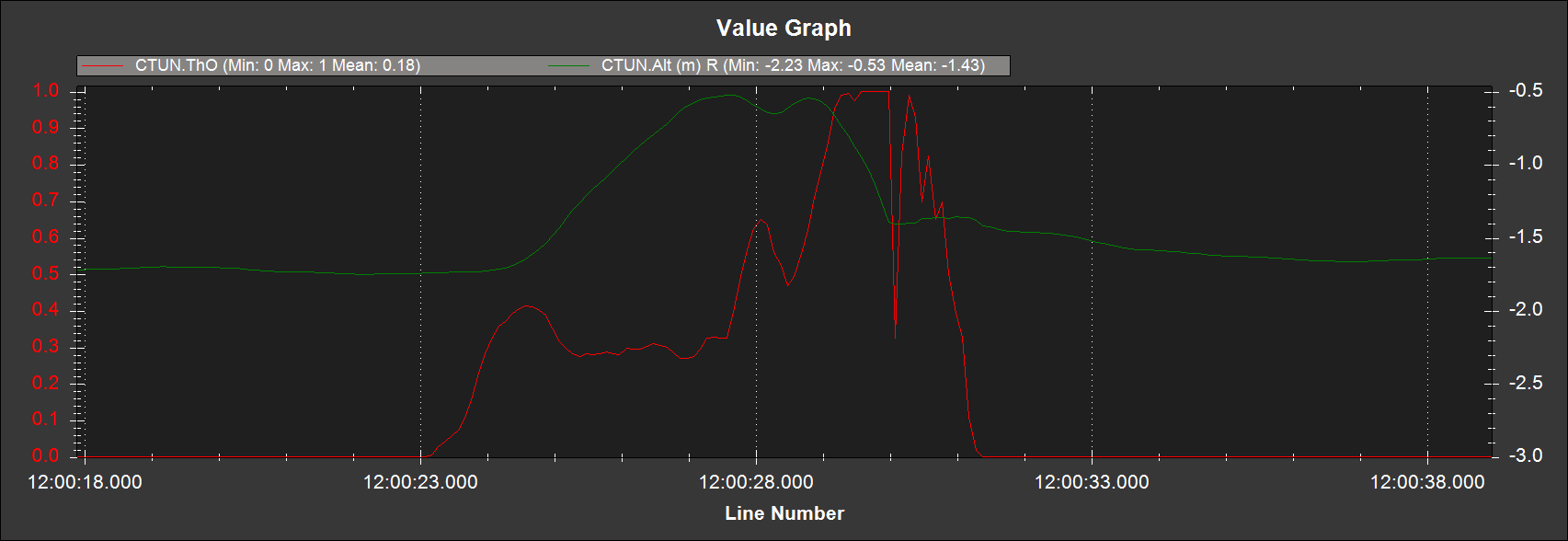
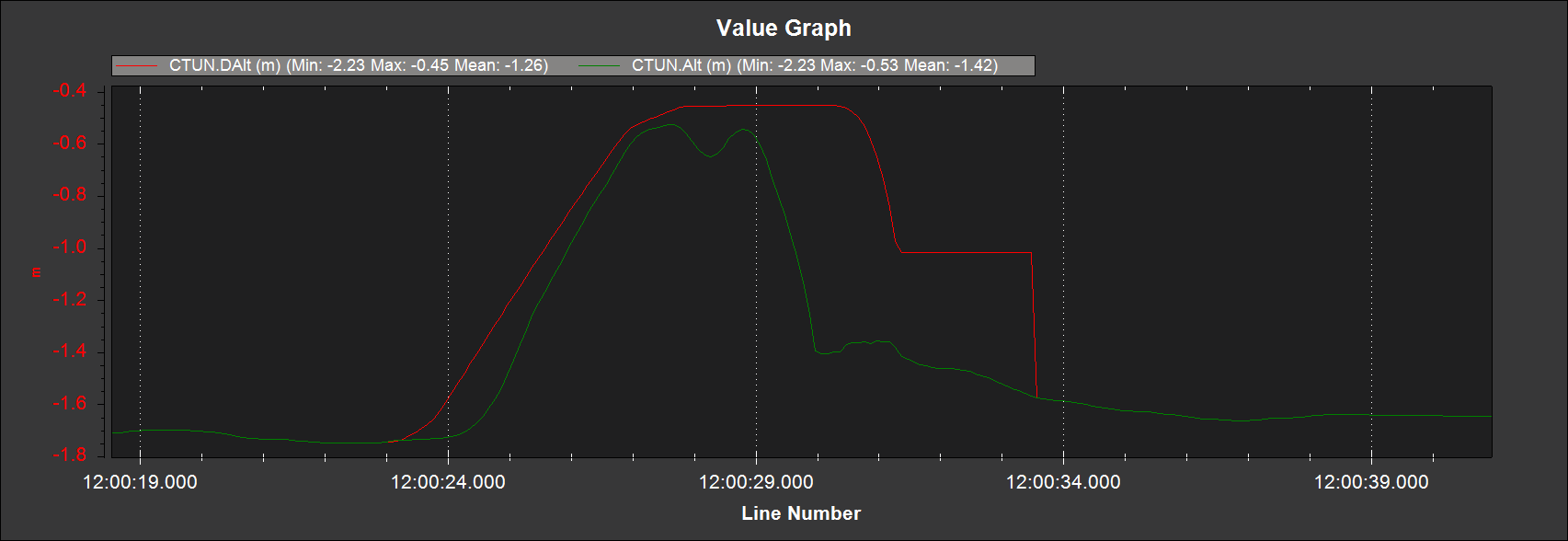
Looking at the desired altitude there should have been no reason to suddenly increase the throttle to 100%
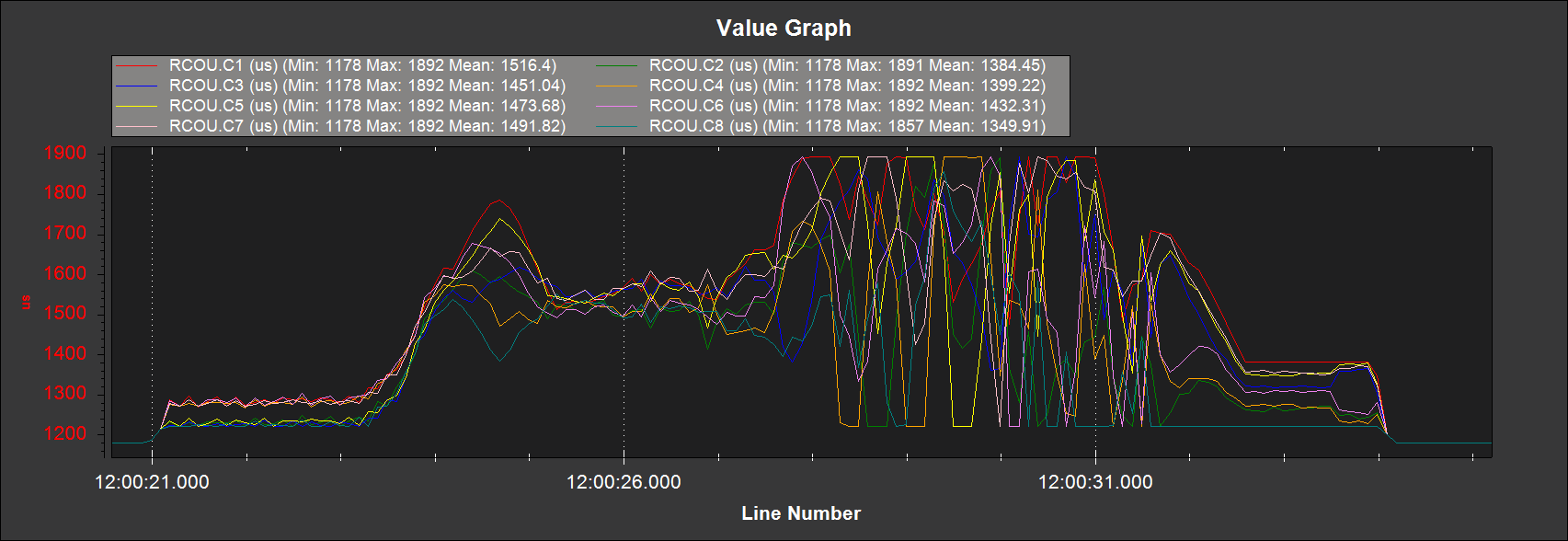
The motor outputs also looks okay (there was a strong breeze blowing):
Could it be that the tuning is so different with these motors that the drone tried to correct for the breeze but due to the untuned response became unstable?
Does anybody have some insights as to what could be a possible cause?