Hello everyone,
I am using T-motor and alpha series ESC in my octocopter frame with following parameters
MOT_PWM_MIN 1100
MOT_PWM _MAX 2000
MOT_THST_EXPO 0.25
MOT_SPIN_ARM 0.07
MOT_SPIN_MIN 0.1
According to t-motor datasheet it will required 50 % throttle to take-off with my AUW frame so PWM should be 1500 to 1550. But its going more than 1660 initially.
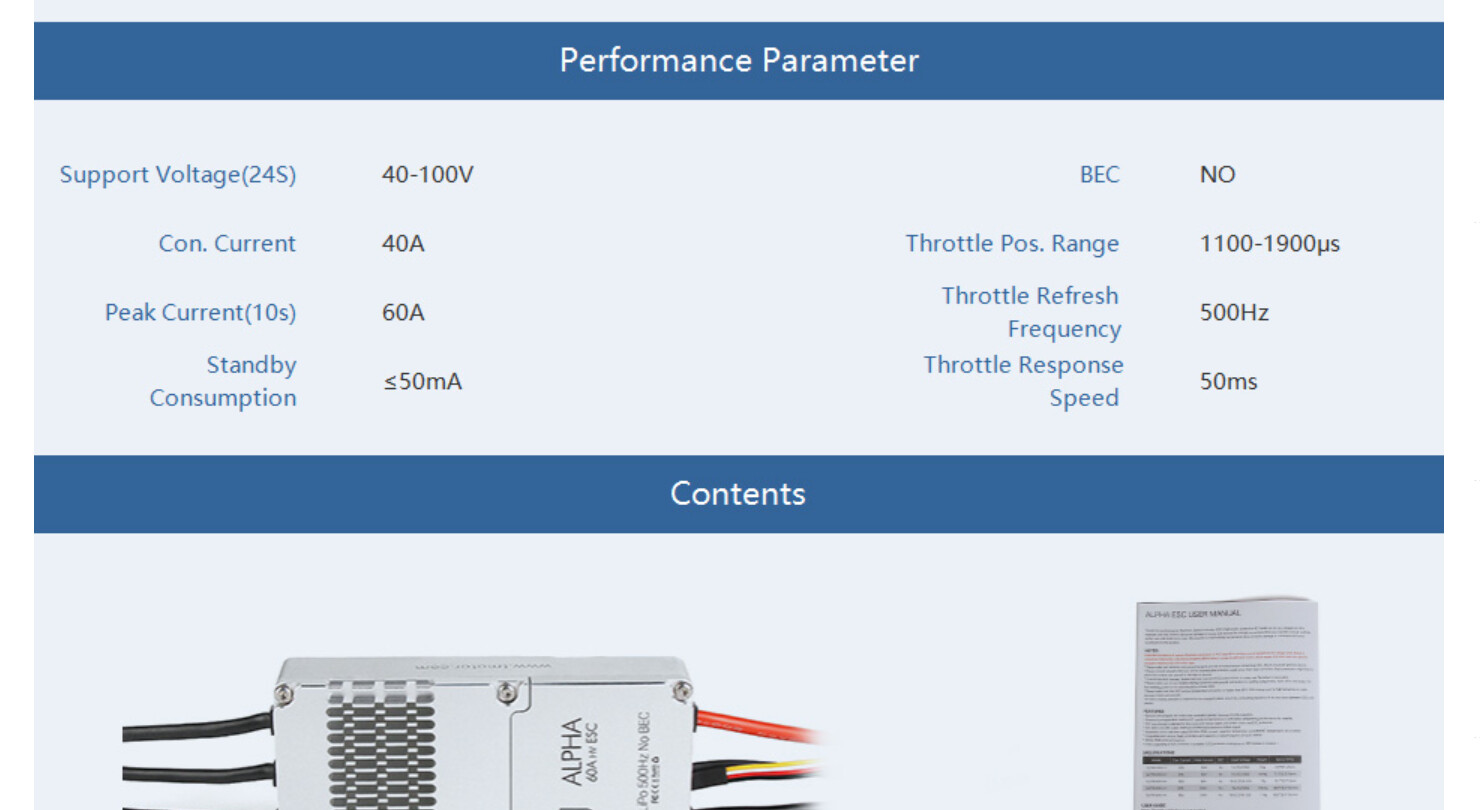
first, the throttle position range according to the specs over at T-motors page is 1100-1900. You mentioned you used 1100-2000. That shouldn’t cause what you’re seeing now though. But it might cause issues if the drone ever needs to use the upper end of the throttle curve. If you’re really unlucky the ESC might cut throttle when the signal is out of range.
Also, what weight did you fly at when the issue appeared, and is the octocopter a flat one, or a quad frame/coaxial configuration?
In your experience, how much loss does a coaxial configuration give you?
If it should hover at 50% throttle (1500pwm) assuming the weight of the craft matches what 8 of these motors would produce according to t-motor, a pwm of 1660 would give a thrust loss of around 32% if I calculate the increase over the used pwm range of the alpha ESC (1100-1900).
Could that value be correct for a coaxial configuration? If so, that could be why it won’t perform according to specs?
(edit is wrong, I looked at the wrong ESC… Rest abow is correct) Edit… They apparently have two versions. the 24s 60A and the 24s 60A V1.2. The 1.2 has the 1100-1940 as you said. I guess we need to know which 24s ESC is used
Ha - you might be right - I’ve always specified the range I did above
I see on the official web site the same as what you see too!
Other model Alpha ESCs say
so who really knows??
For example the flame ESCs used to say they couldnt be calibrated and to use the range I specified, but now they dont specify a PWM range at all, but say to calibrate them ¯_(ツ)_/¯