Hi all! Having issue with the thrust of the drone is much less than the calculated one
Have next setup:
– Quad copter.
– Tarot martin 4008 330 kv 6S
– 1755 props
– Xrotor 40A esc.
– 6S LiIon battery. 15 C continuous
– Copter weight 3 kg Payload weight 2kg
With this setup copter total thrust should be 10-12 kg +
Issue:
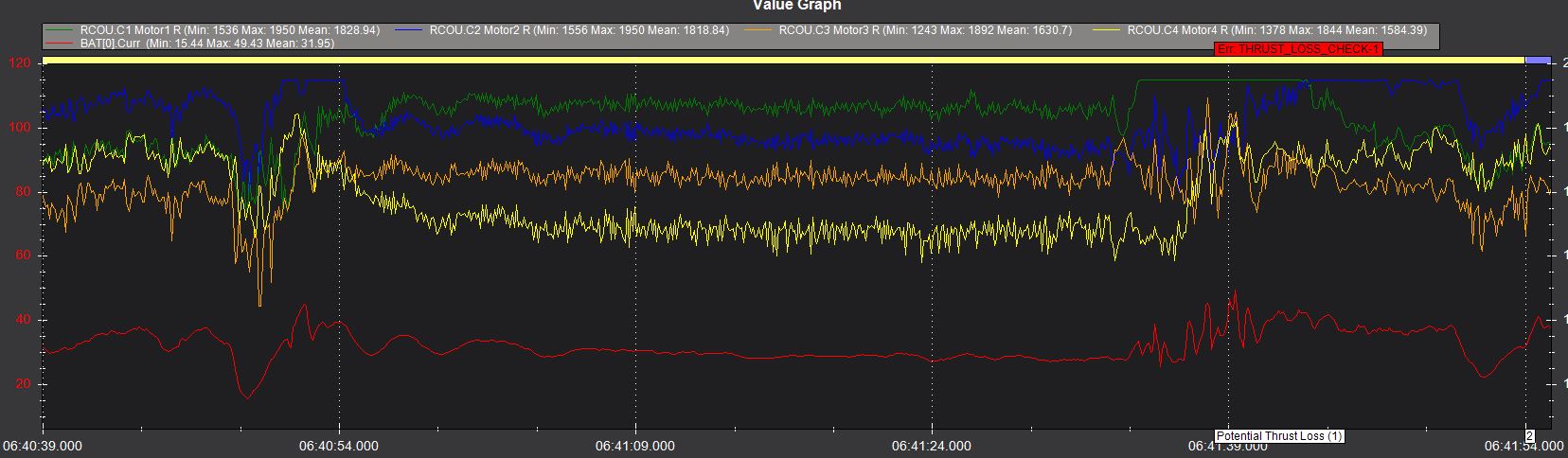
When fly with payload, getting “Thrust loss” errors. Motor PWM signal reach maximum values (1950).
Motors 1 and 4 work more than 2 & 3
After few min of flying copter uncontrollably land. Actually almost falls with additional horizontal acceleration. This situation is repeatable.
At the same time average consumption never jump more than 36 AMPs and motors and ESC are just little warm after heavy landing. Theoretically consumption should reach at least 60-80 Amp in case of full throttle.
Motors perfectly aligned. ESC calibrated.
5kg is a bit overweight for this configuration with an expected hover throttle of ~64% and the log seems to bear this out if you average the outputs (~1680µs). The current is in the ballpark also. The payload seems to be exacerbating a yaw bias that is present w/o the load. It’s not large but it’s there.
Hover throttle for 5 kg (drone + battery + payload) is around 40-45 %. Tested.
The weird thing here is the current. These motors consume 20 amp on full throttle per motor, with these props. I’m getting less than 40 in average.
That’s not what the log shows or what would be expected from that configuration at that weight.
If you are going to fly it in this condition anyway at least address the excessive vibe levels and do some proper tuning. Default PID’s and no Notch Filter configured isn’t doing you any good.
@dkemxr Thank you a lot for help! One question. This prop + motor should give total thrust of 12 kg (let’s say 10 to be realistic). Should it be enough for normal fly in 5-6kg quad copter configuration ? With proper tuning of course!
I tend to believe what eCalc predicts because I have confirmed it countless times with my builds and others. As I said ~64% throttle at 5 kg at Hover and you want closer to 50%. I would say no more than 4kg take-off-weight with that configuration.