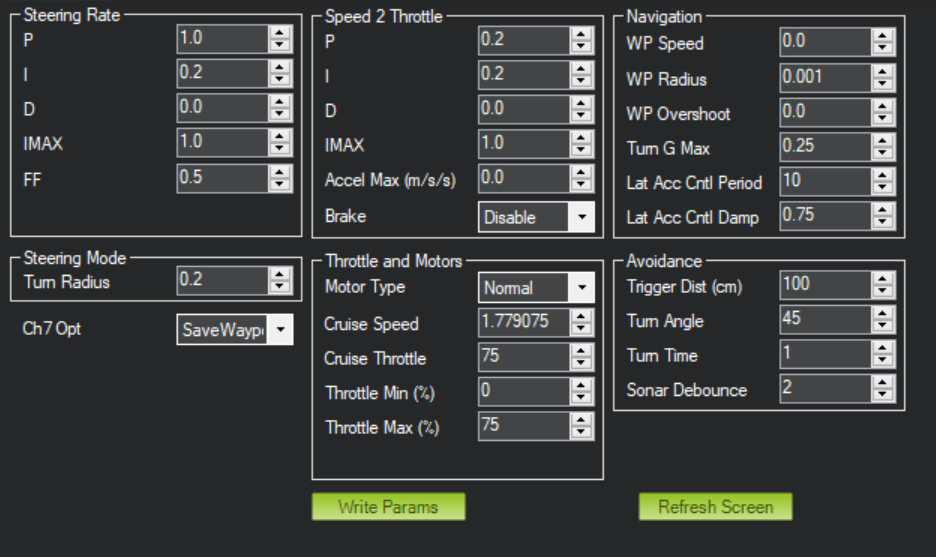
When I rapidly reduce the throttle on my RC controller from say 100% to 50%, The rover will occasionally slam on the brakes, come to a complete stop momentarily, then continue forward at 50% throttle. I’ve been playing around with the Throttle PID settings, but can’t seem to fix this. Any suggestions?
Any chance you could provide a dataflash log (not just parameters)? Also does this happen in Manual mode or only in semi-autonomous modes like Acro and Steering? If it’s happening in Manual mode then it’s most likely an issue with the ESC.
Aaron,
No problem. Maybe stick them in DropBox or some other file sharing service and just provide a link (as you were probably already intending to do).
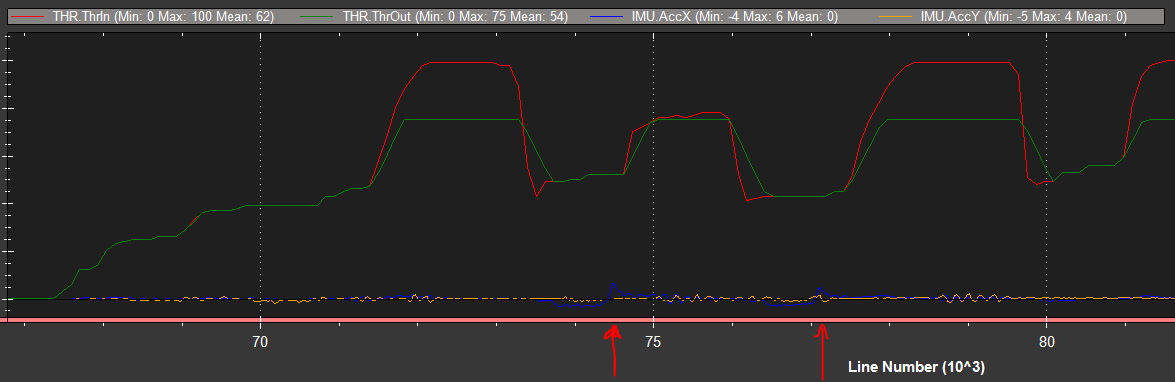
I strong suspect that it’s some weird ESC behaviour but hopefully the dataflash logs will clarify that. We of course can’t see the actual speed of the motors (unless we’re using D-Shot with Telemetry) but we can infer what’s happening by looking at what the flight controller is outputting to the ESCs and what the accelerometers report back (IMU message).
This happens when I rapidly reduce the throttle while in manual mode. I’ve indicated under the timeline the two instances where the rover slammed on the brakes while the throttle was at ≈ 50%.
Seeing that the output from the pixhawk isn’t going to 0% proves your theory that the ESC is indeed our problem.
Do you have any experience with the Sabertooth 2x60 speed controller? Sabertooth 2x60 (documentation on webpage)
Other Notable ESC issue
We’ve had another issue where its misbehaved when rapidly rocking the steering from left to right it errors out and kills the pilot, this can be reproduced in both manual & auto.