Having an issue while testing the rover in automode.
Build specs:
Autopilot: Pixhawk 2.1
ESC: Sabertooth 2x60
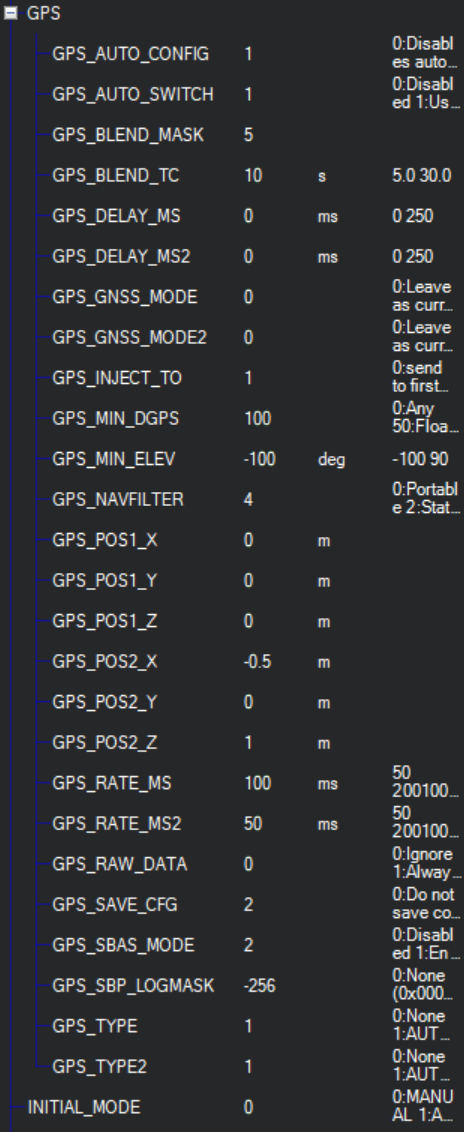
GPS: Emlid Reach (setup with corrections from Reach RS basestation)
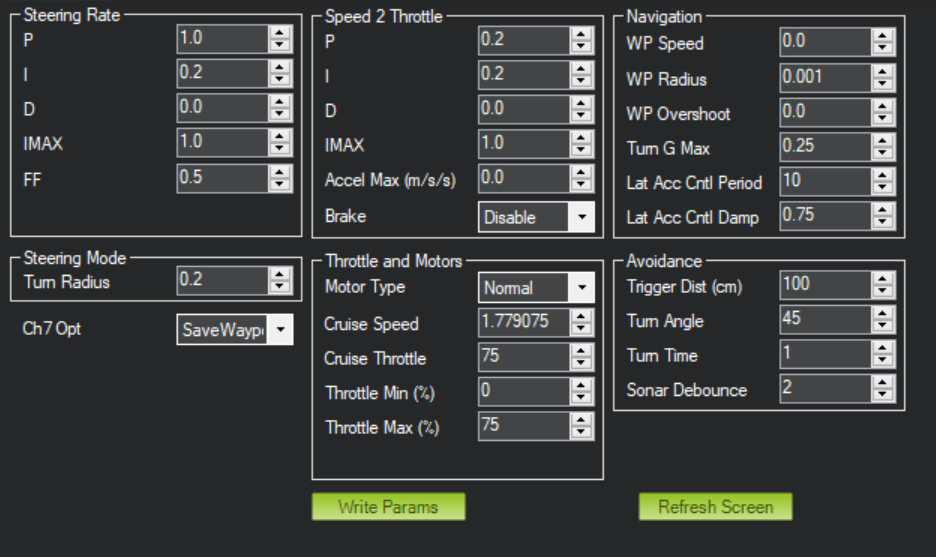
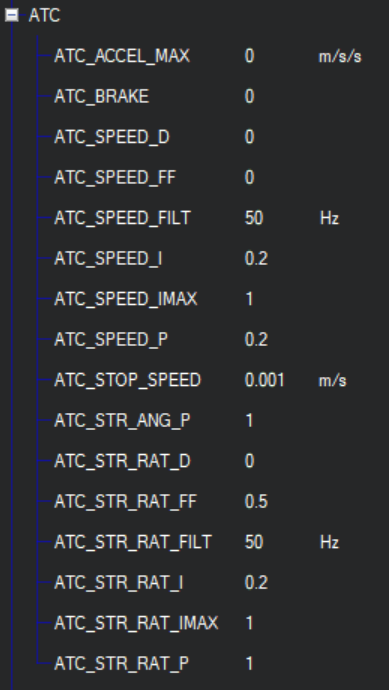
Driving Setup Detailed in separate post: Throttle Behavior
Test 1:
I am marking a spot on the ground, driving the rover directly over said spot, and saving a waypoint. Then driving the Rover 10.0 m away from the marked spot, turning it to face the spot, then flipping it into automode.
The rover will overshoot the spot by roughly 1.0 m, and is generally right of the spot .5m - .25m.
Test 2:
Same thing, but facing the rover away from the point before switching into auto
The Results are unpredictable, the rover can end up anywhere around the point .5m - 1.5m away!
So to dig into this, the first thing we need to figure out is whether it’s an estimation problem (i.e. the vehicle doesn’t know exactly where it is) or whether it’s a control problem (i.e. the vehicle can’t control its position or velocity perfectly).
If you have a dataflash log we can have a peek at it. It’s possible that we may need to add some more logging into Rover to make it more clear how well the controllers are doing. The THR and STER log messages show quite clearly how the low level throttle/speed and steering controllers are performing but our NTUN message (navigation tuning) is a little harder to work with because it doesn’t show Desired vs Achieved clearly.
I’m attaching the same link to the logs here for future reference. Log Files
Log file: “2018-04-26 08-15-31”
Update:
This morning I was able to get the rover to behave a lot better by chance of luck our motor batteries were low so the cruise speed was slowly decreasing which luckily made our navigation far more accurate! so I’ll back off the cruise speed, and go from there.
I’m fairly certain its the latter based on how it was behaving this morning.
Here is what I observed:
We have the batteries up front and next to no weight over the drive motors.
It tends to overshoot the turn angle on turns greater than ≈ 72°
While it’s overshooting the tires are slipping, like it can’t control the inertia of the batteries up front.
I’ll play around with the TURN_MAX_G parameter later on tonight, if the weather remains clear.
Let me know if you have any suggestions on what else I should tweak!
Repeatability
Do you have any suggestions on making the path repeatable? a suggested WP/distance?
I plan on running some tests tonight to figure this out, but i’d appreciate any help I can get!