I’m relatively new to configuring a throttle-based dynamic notch filter, and I could use some guidance from those with more experience in this area. I’ve been working on setting up my system and reviewing the logs, but I’m not entirely sure if I’m on the right track. I would be extremely grateful if someone could take a look and provide some feedback.
Here’s a bit about my setup:
I’m using a hex frame with the Cube Orange Plus flight controller.
I recently made my initial attempt at configuring the dynamic notch filter using the specified parameters. However, I’m uncertain about the results. If anyone can share their insights, I would greatly appreciate it.
1st Test: Logs
Thanks for your previous reply. I have a couple of follow-up questions regarding the notch filter values and the test results.
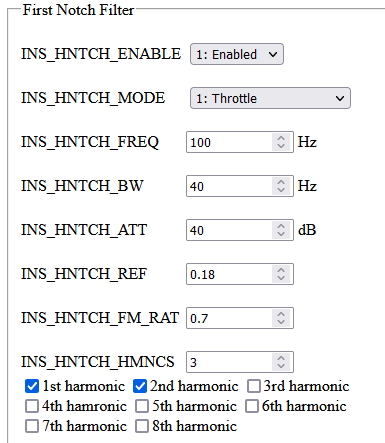
Did you mean to suggest using the FIRST NOTCH FILTER values you shared for our next flight to reduce the noise at 100 Hz?
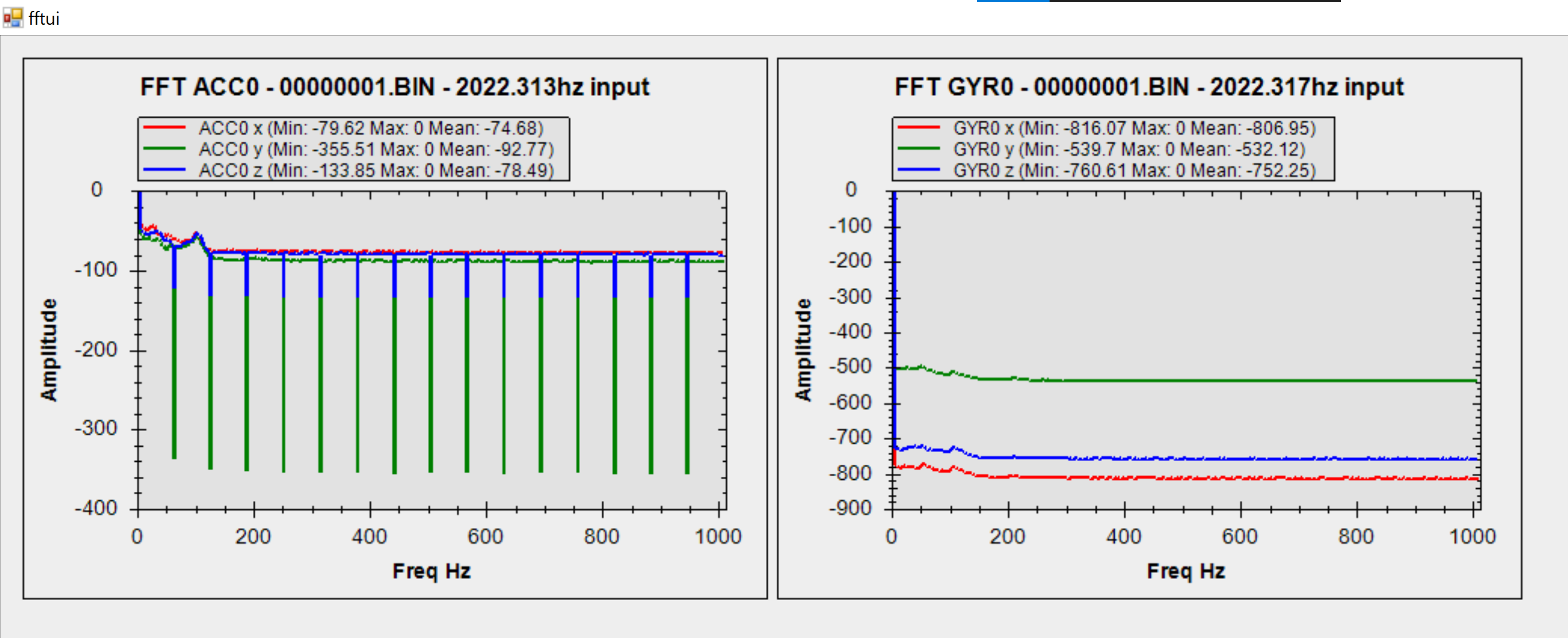
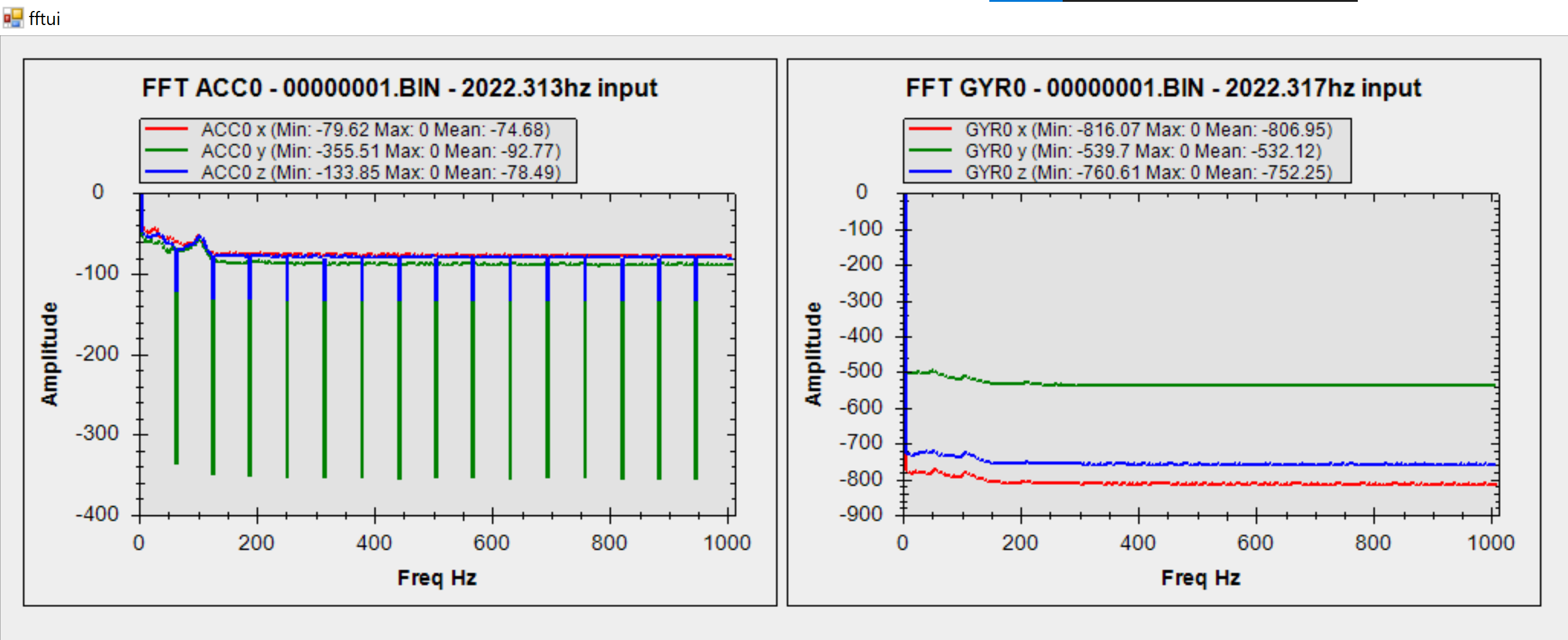
In the test we conducted, we observed the amplitude dropping to -500 and -800. I’m curious if this drop in amplitude is within an acceptable range, or if it indicates any phase lag issues?
Logs
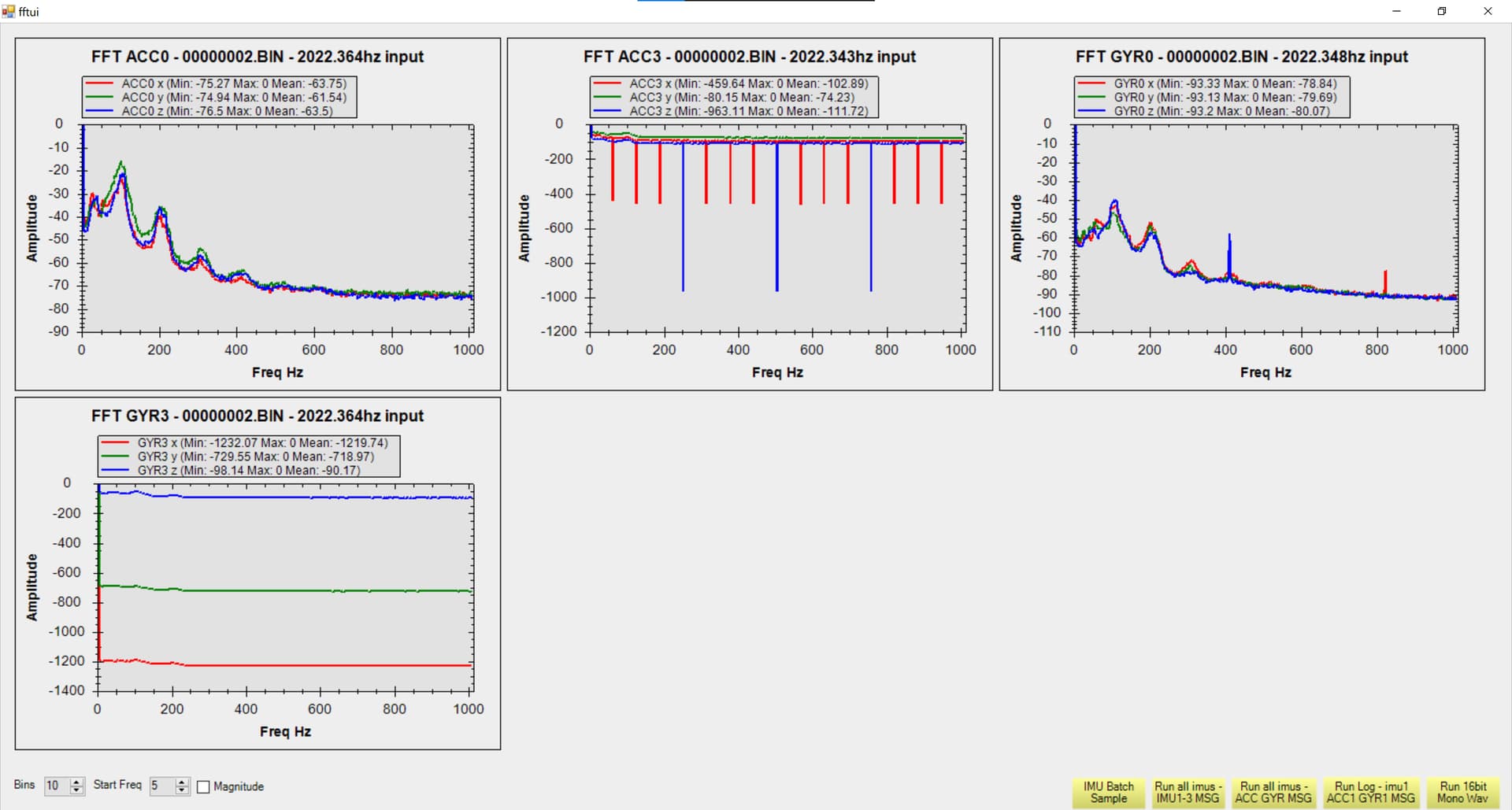
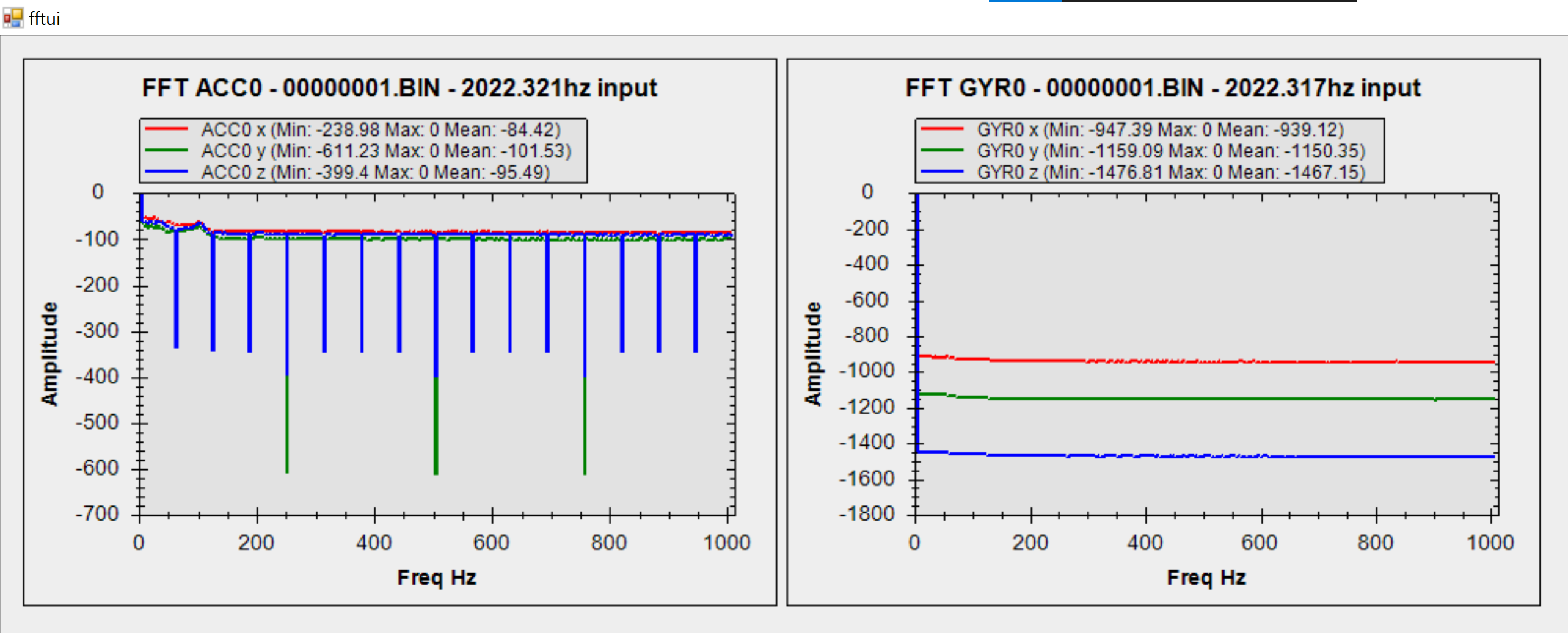
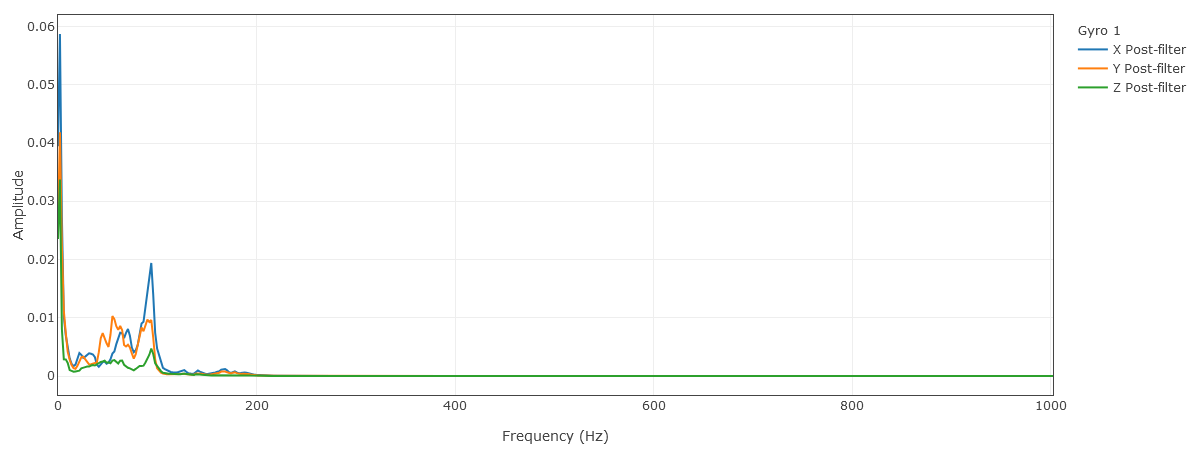
However, in the mission planner’s FFT >> IMU BATCH sample, I’m seeing unusually high amplitudes. Here also amplitude dropping roughly to -900 and -1500. Could you help me understand why this might be the case?
If you need any logs from the test, please let me know, and I’ll be happy to provide them.