My personal favorite is the big Synergy heli’s. But they’re not lighter - they’re built like a tank.
There’s nothing wrong with the Trex - they’re just a light built very well balanced machine so they’re super quick. With a few modifications they make a pretty good UAV heli - either put on bigger tail blades (if you’re running low headspeed) to give it the tail authority, or change the gear ratio on the tail box. In the later Align models they made it not possible to change the main transmission or tail ratio - one downside. They just like lots of headspeed to stabilize them properly.
It is totally normal. In any altitude controlled mode in ArduPilot you do not have collective control. The autopilot controls it and all you do with the collective is make a climb or descent rate request to the autopilot.
Please get used to referring to this as collective control. Throttle control is on channel 8 and deals with engine throttle, not collective.
Only stabilize and acro flight modes have normal collective control and response to stick inputs. Therefore, the helicopter can only be autorotated in one of those modes. It can not be autorotated in Alt Hold, Pos Hold, Loiter, Auto Land, or Auto Mode (missions). The autopilot will do a beautiful blade stop and crash it if the engine quits in flight, or you shut the engine down in flight, in any of the augmented modes.
I’m setting up the system from start after the Heli crashed landing in Loiter mode and I thought I saw this swash behavior on the ground before the crash.
I assume that the swash did this movement at landing and for some reason the Pixhawk revs again and the Heli flipped over.
Do you have a log from that crash? What likely happened is that the EKF processes switched due to inconsistent IMU’s, the attitude solution was totally different with the second EKF process, and it flipped it over. I never land or take off helicopters except in only Acro or Stabilize. I do not trust the autopilot to have control of the machine in close proximity to the ground. In flight the autopilot does a very good job of flying it. Helicopters are quite dynamic machines and a GPS glitch or EKF switch close to the ground, or on the ground, will turn a helicopter into flying parts.
I think I heard your ground station announce the EKF switch in the video after the fact, which is likely what caused the radical behavior. With PH2.1’s I have gone to setting EK2_IMU_MASK to 1. This limits the system to using only the first IMU and will prevent the EKF process switching. It supposedly reduces the “redundancy” as well. But redundancy is not worth anything when the redundant system is doing something totally different from the system it is supposed to replace.
The design of the EKF system using multiple IMU’s requires that all the IMU’s agree with each other for the “redundancy” to work right. The only controller I have flown where the IMU’s agree all the time, even at high vibration or G forces no matter what you throw at it, is the Pixhack V5. But that controller is not yet available to the general public as a production version. So my “fix” is to set the EK2_IMU_MASK to 1 to prevent what happened in your video. I have experienced that several times testing landing in the augmented flight modes. The only thing that saved this one was a quick switch to Acro flight mode with flybar mode turned on, which disconnects the attitude controller and gives the pilot straight-thru control of the machine. And even then I had to “hunt” a bit with the cyclic to find level on the skids after the autopilot messed up.
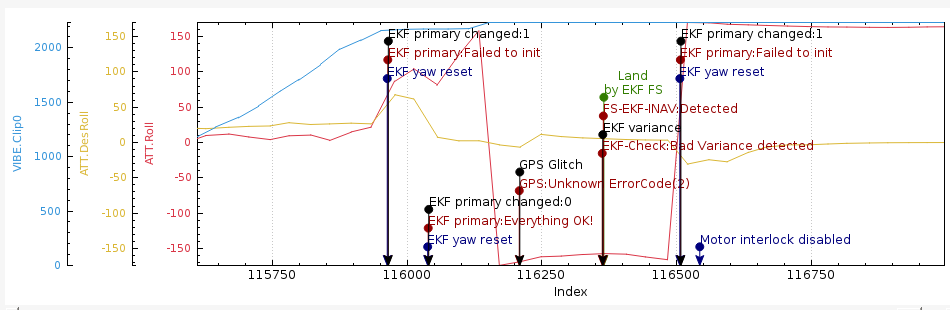
PH2.1, GPS glitch on landing caused an EKF switch, the second EKF process had a different idea of where “level” is than the first EKF process.
Yes, it looks like the IMU’s went totally whacked, the EKF switched, the desired roll went from ~27 degrees to ~67 degrees, which is going to cause main rotor contact with earth and explode the helicopter. After it does it it switches back and says everything is ok now - we crashed the heli and it’s dead. Since we don’t really know what’s going on lets declare GPS glitch, a bunch of other EKF errors, EKF failsafe, etc…
Nothing I haven’t seen before. The way to “fix” this is to set EK2_IMU_MASK to 1 so it can’t switch EKF processes. That way if the primary IMU gets whacked the worst it causes is some drift in the accuracy of the unit and you may have to fight it a bit to land it with the sticks, or it may cause a more gradual tipover that you can recover from with Acro. But at least it doesn’t go with a totally whacked out solution like it does when the EKF switches.
This is usually blamed on vibration, which is true that excessive vibes cause it. However, not all controllers are created equal and some are better at damping vibration, and have more consistent IMU’s than others.
After long time, I fixed the Heli and replaced the main shaft, blades, tail servo and more.
Performed the 1st flight today and everything seams to be ok.
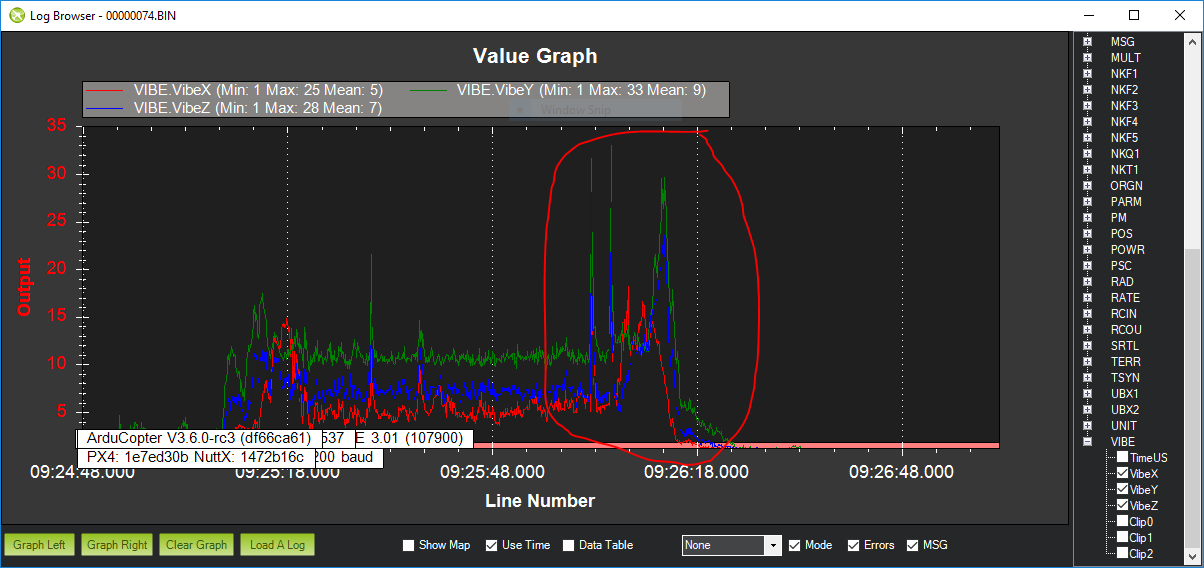
Before switching to Loiter I would like to be sure that the vibration are at the normal rang but I don’t know if it’s looks good now or if there is any improvement, can you please help to analyze it?
Hi @rotems yeah, it actually looks pretty good to me. The heli should handle fine at the </= ~10 vibes you got there in flight.
I see you are still using 3.6.0-rc3 and might want to consider putting in the latest stable 3.6.5 firmware. There has been several improvements since the release candidates.
Thank you…
Can you please advise in what tool are you using to analyse the log file?
I was trying to use the mission planner and I’m getting in some points vibration level around 30 (see attached image).
I did update the firmware to 3.6.5, but witch setup to choose,setup or upgrade?
At the next flight I would like to try to switch to Loiter in the air, others reporting that it cause to the Heli to jump in the air, what should I check or set to minimize it?
Yes, there is a few spikes during maneuvers. But the overall average looks good to me, and I didn’t see any IMU clipping.
If your helicopter is tuned with the param file available from Mission Planner’s frame params, it will not have any issues with Loiter. If you tuned it yourself you’ll just have to try Loiter and see what it does.
Only just saw this; I have a Protos 600 that I’m very happy with. It’s a very easy design to to work on and easy to modify, due to it’s unique ‘main frame’ design.
My Heli is flying ok now at stabilized & loiter mode (I think additional tuning is required but it’s fly’s).
Now when switching from stabilized to loiter the Heli is descending a little and when changing back to stabilized it’s gaining height a bit, I think it’s related to throttle stick center, what is the right way to tune it?
In addition, when I checked the flight log file I can see that the RC is lower in 100us then the RC out, is it OK?
Next stage is to try to takeoff, fly and land in loiter mode, any suggested check to do before?