I’m using RSC mode 3 and I’m trying to set the throttle and collective curves and probably I don’t understand the way it’s should work.
While I’m setting the collective pitch curve (stabilized mode) the motor setup is changing as well… why?
in addition, what is the yellow curve line (impossible to read the index) and what is the V curve?
I just happened to catch this by chance. It should be in the Traditional Helicopter section.
I have done a pretty extensive explanation of how to set up throttle/pitch curves for helicopters. It is the forth video in the series and is centered on piston and turbine engines. But also applies to electrics.
I also did a follow-up video some time later focusing on fine-tuning the throttle curve.
The throttle curve is set only in manual flight modes. Set up correctly in Stabilize or Acro, it will automatically work in Loiter. For helicopter I would HIGHLY recommend upgrading to 3.6-rc1 with the five-point throttle curve if you have a combustion engine heli. The old three-point curve in 3.5 will kind of work with an electric. But does not work all that great for piston or turbine engines.
I watched all four videos, they are very helpful !!!
I’m flying an electric Trex 700.
At the beginning of setup I set the 3 collective point (Low = -10°, MId = 0°, high = +10°, using H_SV_MAN) and didn’t touch the curve setup yet, in this state, when activating the motor (releasing the motor interlock switch) at low throttle stick the motor rev to his max speed and the pitch is -10°, at mid stick the motor slow to mid and the pitch is 0°, at high throttle stick the motor rev again to max speed and the pitch is +10°.
After watching your video (4th) I have started to tune the pitch curve and noticed that the throttle is changed as well according to the pitch curve, if so, what is the best way \ process to tune the throttle\ pitch curve ratio?
Another issue is that my Heli some times carry a heavy load so in order to hover it required more throttle stick, therefore, when trying to descend, the Pixhawk will not descend only until the throttle stick is below mid point when the motor revs are very low, in that point the Pixhawk is compensating the low rev with high pitch (in order to maintain high) until the Heli start to descend because of low revs (and max pitch)… not a desired situation, what is the solution?
Wow, this is the problem with the old three-point curve. Do you really need the -10 degrees of pitch? If the heli is not doing inverted maneuvers and is being used only as UAV I would recommend setting the negative pitch to only about -2.5 degrees - just enough to recover quickly from a loss of headspeed due to in-flight power failure so you can autorotate it.
Then re-adjust the IM_STAB_COL’s to get it to hover at mid-stick in Stabilize. And set the throttle curve accordingly to maintain a relatively constant headspeed no matter what the collective position. This should get the old three-point curve to work fairly good with an electric drive.
Your three throttle curve settings would be at -2.5 deg of pitch, zero degrees, and maximum pitch (I’d recommend about 11 degrees).
Again the five-point throttle curve in 3.6 will work much nicer than the old three-point curve. I have flown both electric and piston with the five-point throttle curve and a governor is not needed if it’s tuned properly.
I should clarify that when you set your pitch range it is best to initially leave the IM_STAB_COL’s at the defaults of 0, 400, 600 and 1000. Then tune the three point of the throttle curve to get the right headspeed. You can have the rotor slow down a bit at the NEGC point if you want. But it should remain pretty constant from power low to power high as you load the collective.
After you get it so it holds steady headspeed, then set the IM_STAB_COL’s so you get a mid-stick hover in Stabilize flight mode.
The amount of lift you get will be dependent on the headspeed. And this will affect the IM_STAB_COL’s. So it’s important to tune the throttle curve first. So if you set the three points of the throttle curve to say 400, 500, 750 you should get a slight slowdown of the engine with the collective all the way down. It should speed up as you increase collective to zero pitch. And as you add load to the motor by increasing collective, it should stay constant speed. The old three-point curve works pretty good with electric if you set the pitch range to the -3 to +11. You won’t end up at 1000 for power high usually. But this is not as big of a deal with electric as it is with combustion engine. Electric motors can produce 100% torque at zero rpm. Piston or turbine engines can’t unless they have a torque converter.
When updating the firmware, all the settings \ parameters are reset to default (need to perform RC cal, cyclic level and other setting from the beginning) or all settings are saved?
I’ve update the firmware to 3.6 and set the pitch to -3° - 11°.
Everything went well but it seams like the Throttle is very sensitive to even a small change of the throttle stick, the motor change RPM very aggressively that even the tail is running all over.
At the second flight when switching to Loiter the main gear just broke from the motor reaction.
Every flight starts at stabilized mode > land > switch to loiter > 2nd takeoff.
Yep, your throttle curve is a little too steep for an electric. It needs to be flatter. Would you be able to export your param file from your ground station, or post the throttle curve settings so I can see what they are?
Hi Rotem,
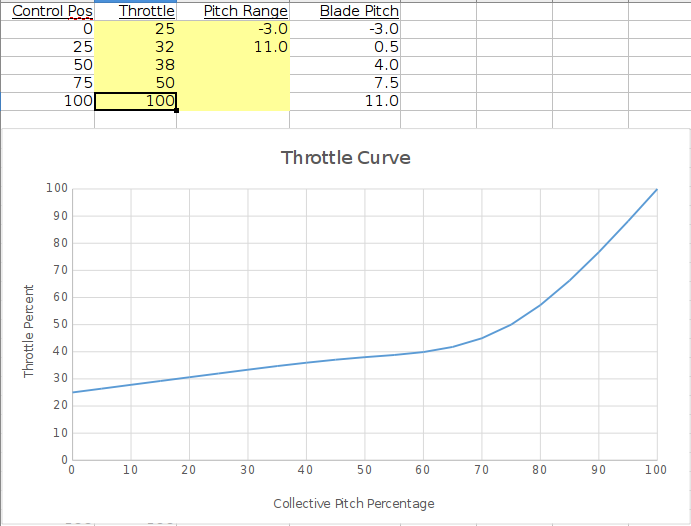
From your log it looks like you’re using ~80% collective pitch to get it into the air. Probably due to headspeed a little too low. The throttle curve you are using is the default, more for piston engines. Electric has to be a little flatter.
So your current throttle curve looks like this. Note how the throttle increases very rapidly above 80% collective pitch. This is why it is so touchy.
You really should be hovering somewhere around 65-75% collective (from about 5 to 7.5 degrees of pitch). So let’s ramp the main a little quicker on the bottom end and flatten that curve once we get in flight to closer fit an electric motor.
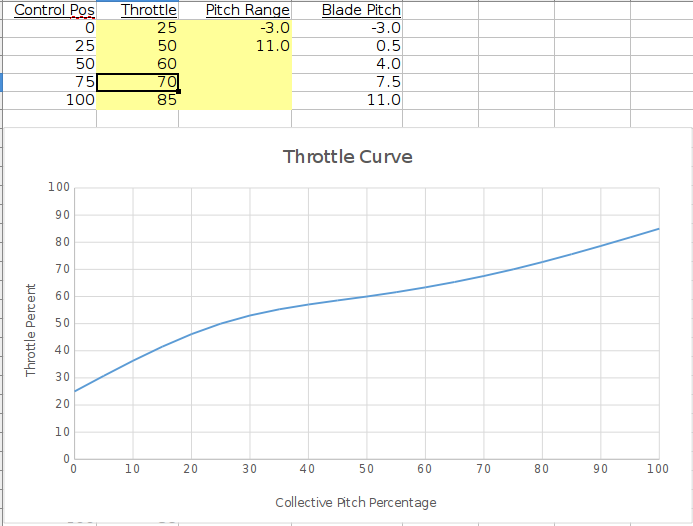
I don’t know what your desired headspeed is, but typically electric drives like to be at least 70% throttle at hover or the ESC gets really hot. So let’s start out with a throttle curve that looks more like this
This will increase rotor rpm faster on the bottom of the collective, and not change it as much as you load the collective in flight. The settings for this are:
0 = 250
25 = 500
50 = 600
75 = 700
100 = 850
Now, if the headspeed is higher than you like, adjust the THRCRV 50 and 75 points down a bit. If it’s still not enough headspeed, adjust those up a bit. Once you get the headspeed where you like, now load it by slamming in full collective pitch and see what it does. If it “bogs” and loses headspeed, increase the THRCRV 100. If it over-powers and increases headspeed on a full collective punchout, then reduce the THRCRV 100 point a bit.
Basically, the THRCRV 0 is your ground idle speed you would like with the collective all the way down. The THRCRV 25 point will determine how fast it ramps up as you increase collective pitch. THRCRV 50 should be almost light on the skids and the head should be running at the speed you like - adjust accordingly. Between THRCRV 50 and 75 is hover and normal flight range - so you can adjust the 75 point so it holds constant headspeed as it goes from light on the skids to hover and general flying around. The THRCRV 100 point is your max power setting to maintain headspeed when you really put the screws to it.
Electric motors can make maximum torque at 85% throttle due to their nature. Piston engines can’t and require the throttle to be wide open to produce maximum torque. So that is why the curve for an electric will be a lot “flatter” than for piston or turbine engine heli’s.
After long waiting for spare parts, I manage to perform a flight with your recommended setup and it worked perfectly!
The next step is to fix the tail wag.
As you can see in the video, the tail is waging and if I hit the throttle, the tail is undershoot, what can be the reason for that?
In addition, I would like to have the Heli more responsive to stick commands and make him fly faster, what parameters should I change?
You have not tuned your heli at all. In Mission Planner in the frame parameters you will find a TradHeli Copter3.6 setup parameter file. Please load that into your flight controller and see if it makes a difference in how your heli handles.
I’ve loaded the TradHeli parameters file and preform a test flight, unfortunately, the tail wags became worse.
In addition, I don’t know why, but after lending in loiter mode, the Pixhawk is tilting the swash plate to the right, causing the Heli to flip on the ground.
I’ve attached the log flight and the parameters file.
Tail wag… Sometimes using the ESC governor mode (Such as 99.99% of full size heli) helps removing tail wag as tail rotor speed is quite high and has lots of authority… Just my 2 cents…
Henri
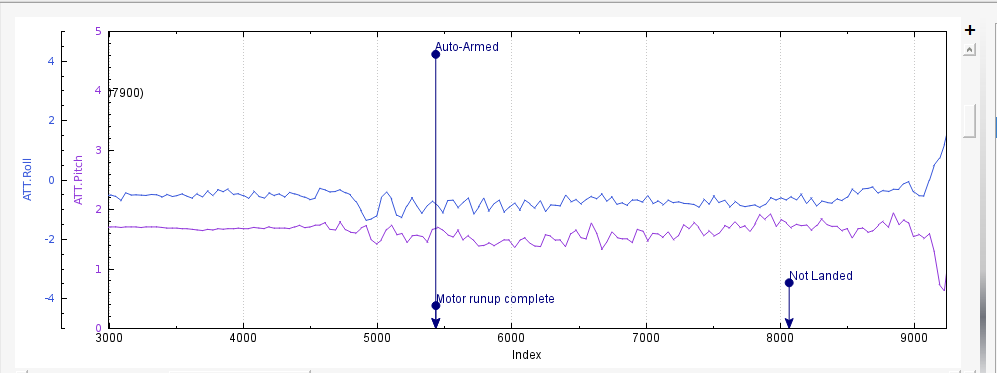
I see tail bounce. Your vibes are right on the edge of being tolerable in flight - you’re getting some clipping of the IMU’s even in hover. And the heli is not going to fly decent that way. Part of the vibes could be coming from this:
Notice how you get a definite roll and pitch oscillation during runup. It’s normal to get some, but this looks like blades could be not tracking right, or the main rotor is out of balance.
I do not recommend taking off or landing in Loiter flight mode with a helicopter. Some say they do it all the time, and that’s good. But if you get a GPS issue you will likely crash your helicopter. You do not have any control of the heli in Loiter. The autopilot controls it and all you are doing is making requests to the autopilot to move it. This is a highly dangerous situation with a helicopter and I have a video as well that demonstrates what can happen when depending on the autopilot and GPS for takeoff and landing. I had to quickly switch to Acro flight mode here to get the heli to behave or it would’ve tipped over. Just a simple GPS glitch on landing caused it. And throttle hold was engaged and the heli in spooldown when it happened - it just had enough power left in the main rotor during spooldown to tip it over.
So I say use these augmented flight modes for takeoff and landing with a heli at your own risk.
This should be an issue against heli in github. We should do a better job of designing the loiter flight mode so it does not do this. I suspect I know the issue and hope to correct it as we are combing through the code to implement the spool logic. I believe this issue is the same reason that we had the collective jump in althold and loiter. The loiter flight mode was designed for Tradheli to continue to work with motor-interlock disabled and the aircraft disarmed.
So the mode is designed to set the desired position to the current position once it is landed with the motor interlock enabled and vehicle armed. Once the interlock is disabled the desired position is the left loose from current position. Thus the issue you had was that you experienced the glitch as you were landing and the land complete flag had not set. When you disabled the interlock, it continued to try to position the aircraft when in if designed properly should have relaxed the position controller helped the situation.