So i’m about to order a bigger power module that will be the permanent solution once I get beyond all this setup and initial testing and commit to wire runs and device locations.
I’m assuming the Mauch 200 AMP Hall sensor is what i’m looking for? What else would I need to complete the setup? I’m seeing that’s just a current sensor, can I still somehow use the stock included module to power Pixhawk and the current sensor for my 12s lipo setup?
Tim
Bill, I’m sure it does. I’m just not well versed on that aspect of looking at the logs.
Tim, yes. Just to want to verify this - you have the FC on the left side of the heli standing on edge?
AHRS_ORIENTATION,20
Everything else is set to the defaults, using EKF2 with only IMU’s 0 and 1, no optical flow enabled that I can see. Accel and compass cals were definitely written to the board. Auto gyro cal enabled on startup.
I sent a request to Randy to have a look at this because I don’t know what the issue is.
Chris,
Yes, the Pixhawk is mounted on the left side of the heli on its side. 270 degree offset. I just re-calibrated the accelerometers and re-calibrated level. Sitting on the desk the horizon is spot on while the heli sits level within a 10th of a degree on the desk and there is no movement of the horizon just sitting there. That being said after the calibration I get the “Bad gyro health” message again. I was very cautious as to not move the heli when I clicked confirm while calibrating, I fab’d up a stand of sorts so I could do it “hands off”.
Tim
I have my Pixhawk mounted that way at my Heli and I have the AHRS_Orientation = 20. That is the right value.
Hi Tim,
I wish I had an answer for that but I don’t. I don’t know what’s causing the EKF to try to use Optical Flow. I hope Randy might have some insight on that. And I did a little searching and reading on the bad gyro health issue with Pixhawk2.1 and I find some reference to it, with some suggestions, but it doesn’t seem anything definitive. Anything from power it on, warm it up, then reboot. To maybe using the latest beta version of MP to “fix” it.
http://discuss.ardupilot.org/t/pixhawk-2-1-gyro-and-compass-problem/12936
In the past, bad gyro health meant a hardware problem and it rarely went away by changing software as it meant something was going south on the board. So unless one of the devs that is more familiar with the new code for the hardware can offer a suggestion, I’m at a bit of a loss to figure out what to do next. I’m sure you’ve loaded rc4 and not rc1, which I saw in one case “fixed” bad gyro health. Since you have it logging without being armed be interesting to see what the accel values are on the latest BIN file just sitting there on the bench not being moved. I only know mine (Pixhawk 1’s) show that it’s not being moved or vibrated in that situation. And they don’t change until it actually moves. And they both agree it’s not being moved. Your’s, that didn’t appear to be the case in the last flash log I looked at.
Tim, wait a minute here. I went back and looked at your log file again and I had missed this before
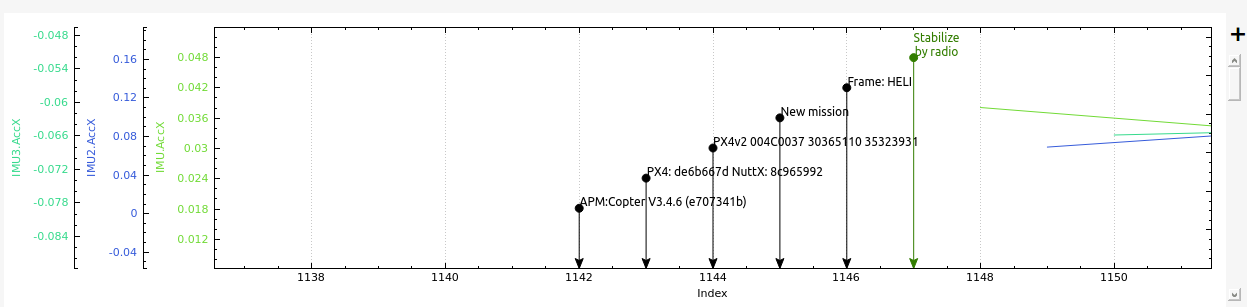
You are running 3.4.6 in a Pixhawk2.1? I thought Pixhawk2.1 can only run 3.5 or newer? I have a Pixhawk Mini here from 3DR that I’m going to put in a heli, and that has the Rev3 chip/2MB flash and can only run 3.5 or newer. How did you get 3.4.6 to load in it?
Chris,
I was just noticing at the top of the MP that it said 3.4.6…  uggh, I am certain I selected BETA firmware and 3.5 Heli.
uggh, I am certain I selected BETA firmware and 3.5 Heli.
I guess I will upload again and see if it holds?
Tim
Yeah. I would suggest loading 3.5rc4 in it and see if it fixes a whole bunch of problems here. Now I understand why the EKF3 settings were missing from your param file too. So load that in there and go the full parameter list and reset everything to default. Then start over with it.
Chris, slightly off-topic, but what are you using for displaying your log files?
Jakob, it is APM Planner2 on linux.
1 Like
So I just re-flashed the firmware. it says V3.5.0. So I calibrated the compass and accelerometers. All seemed good, horizon looks good but when I go to set up the swash servos, I cant reverse them as the boxes are grayed out? I’m back to the weirdness I was experiencing last night…
Timtimbaconheli 3.5 RC4 Parameters.param (13.5 KB)
https://drive.google.com/file/d/0BxUn7rkPzp9sd1RSUXFmQTJNc2s/view?usp=sharing
this should be a .bin from the new firmware, 3.5. Servos are acting very weird, RC is showing correctly and calibrated alright, but the servos start and stop “seem to lock up at random” and quit accepting commands, in addition to the issue of not being able to set swash servo positions and offset.
Tim
Oh, something else I noticed, with 3.4.6 installed inadvertently, the pixhawk has breathing led’s on the cube, now with 3.5, I get no led on the pixhawk.
Tim
https://drive.google.com/file/d/0BxUn7rkPzp9sd1RSUXFmQTJNc2s/view?usp=sharing
3.5, no error messages, just weird the servos stop responding on the bench at times. I noticed the red led on the GPS goes from solid red to flashing red when the servos stop functioning.
So I did get the swash servos moving right, I could no use the graphical interface, I went into the Full tree and adjusted servo reverse to 1 on servo 2 & 3. all looks good and it corrects right.
If the servos dident stop working and there was some led light action on the cube I would be in much better shape I think.
Tim
Tim,
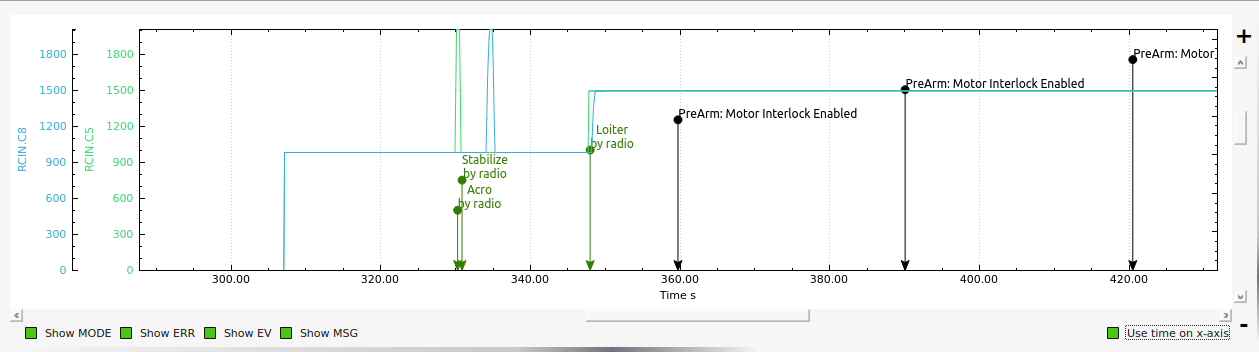
The accels now all agree. I don’t know what you have going on with your radio, but the interlock was enabled to spool up the heli. And you switched to Loiter flight mode. The servos won’t work in Loiter unless the heli is armed.
As soon as you got done with the accel cals I see you must’ve turned on the radio. The FC switched itself to Loiter, as I see 1500pwm on rc5. And you sent the governor signal to it on rc8, also at 1500pwm and enabled the interlock. This tells me you don’t have your radio set up right. I can see you trying to move the collective and cyclic but it’s not going to respond in Loiter unless it’s armed.
Now is where you need to quit going seat of the pants and carefully study every aspect of heli setup starting here:
http://ardupilot.org/copter/docs/traditional-helicopters.html
Your radio needs to be set up, and that means you do NOT use a helicopter setup in the radio unless your heli setup options allow “straight” swash. Otherwise use a setup for an airplane. All CCPM mixing is done in the FC, there is no mixes from the radio. RC1 is aileron, RC2 is elevator, RC3 is collective, RC4 is rudder, RC5 is flight modes (and make sure they are set up), RC6 reserved at this point for tuning, RC7 optional mode, RC8 is governor.
All 8 of those must be calibrated to their full range. For throttle in ArduCopter you will use:
RSC_MODE 1 for a channel 8 output tied to the collective for a “traditional” throttle curve from the radio
RSC_MODE 2 for a piston or turbine with a governor or ECM, setting RSC_IDLE to the speed the engine needs to spool up to in ground idle without the clutch engaged. Or this mode can be used for electric with a governor in the ESC and leave RSC_IDLE set to zero.
RSC_MODE 3 uses a V throttle curve that is set in the params and Pixhawk controls the throttle based on collective pitch.
Whatever you got right now just sends RC8 to 1500pwm as soon as you turn the radio on. And just changes the flight mode to Loiter and kills your servos. You cannot skip any of the setup, or hop around here and there and play with stuff or you’ll have a crash of biblical proportions the first time you try to arm it and start the engine. And could injure or kill yourself with a big heli if you accidentally start the engine or motor in the shop with the blades on it. Fortunately, there’s enough safety features built in so if you do like you just did and enable the interlock inadvertently, the FC won’t arm and start the engine or motor.
The other thing is, DO NOT use the setup page in Mission Planner. I don’t even know if that works, and if stuff is greyed out, likely it doesn’t. Only use the Full Parameter List to make any settings for a heli. Otherwise refer to above warning about the big crash. You can reverse servos all you want in the Full Parameter List by setting them -1, and I have no clue what GUI page you’re trying to use has that greyed out. But it’s probably a good thing to prevent you from doing something you shouldn’t.
I get a little worried when I see somebody enabling the interlock on the bench with beta software. I don’t know if the blades are on it or not, but if something didn’t work right and it started it could be disasterous. So I can’t stress enough to start at square 1 and do not skip any steps from radio setup to the final product ready for it’s first test flight. Some of the documentation like on radio setup for flight modes might be in the multirotor section of the wiki, because it is the same. But the stuff specific to helicopters is in the above link.
Chris,
Likely I had the switches and dials etc set inadvertently in mid position from a previous radio calibration. It should be in stabilize, which is what I’m in when bench testing according to MP. I’m going to use the castle gov, so at some point i’ll figure that out. I’ve just been having a heck of a time getting the servos to respond properly and the unit to act even somewhat like you’d think it should without a slew of error messages.
Long story short, it’ll be some time before a flight pack gets hooked up to it let alone the blades. Having had a 700 delaminate a set of blades at 2100 RPM and hit the pavement right next to me, I’m certainly well aware of the dangers involved. At least in that scenario I only had some CF splinters to pull out. It was certainly an eye opener some time ago.
I have channel 8 on a knob at the moment btw. I’m using an FrSky Horus for a radio, and since I set the model up from scratch i’m sure there is no mixing etc involved.
I have abandoned the GUI for the full parameter list as well. It is surely bugged as many parts are “un-clickable”
My main concerns at this time are: -The lack of any led lights on the cube, I assume from the literature there should be some. When 3.4 was inadvertently loaded it had led lighting congruent with the manual.
- I hit the button on the GPS after I boot, the servos work for awhile and some time later they stop responding, the light on the GPS is now flashing. Pushing the button again restores servo function. (this is in stabilize)
-at some point while moving the servos on the bench, the swash locks up hard left, I have to unplug the receiver and wait a few seconds and then when plugged in all is well again?
Tim
What I saw in that log was that it was in Loiter as soon as you turned on the radio. Only channels that were not right on 1500 pwm was 1-4. They jumped to 900 when you first turned it on, a momentary spike, then settle in on 1500. That tells me they are not set up or you were really, really accurate in getting them all exactly centered. Here’s RC5 (flight modes) and RC8 (governor)
Then you will use RSC_MODE 2 with RSC_IDLE set to zero and the governor setting is made in the params. All you will have for throttle is an on/off switch on Channel 8.
Just making sure. Keep in mind this is beta software and only been tested by a few folks, and none that I know of on a Pixhawk2.1 with a heli. Having one accidentally start on the bench when your’e dealing with unknown, unproven stuff is always a possibility.
That is a good move. You can do your compass, accels, radio, set up flight modes, and SiK radios. The rest I’d highly recommend only using the Full Parameter List because I don’t know the status of that heli setup thing in Mission Planner, and APM Planner2 doesn’t have it (and I hope never does). Do not use the Extended Tuning page or any other thing that looks like GUI for setting rate PID’s, etc. It will break your helicopter.
I don’t know about that, but everything in that last log looks consistent to me. There’s a button on the GPS? Wonder what that does?
That is going to depend on what flight mode it’s in. That is not normal for Stabilize, but then you haven’t done all the other proper steps yet so nothing can really be decided by that. You are looking at the final stages of setup, after you get the head adjusted, pitch range set, etc… And make sure you got at least a three position switch with stabilize, alt hold and loiter set up. In the last params flight mode 4 had been set to Loiter and flight mode 6 to Acro. When you turned on your radio it first went to Acro, then to Loiter at 1500 pwm.
So I would call it “putting the cart before the horse” trying to determine how the swash acts before you do the rest of the setup. That’s not going to tell you anything because you haven’t even set the collective and cyclic pitch range yet to fit your heli and mechanical setup.
One other comment, Tim - you mentioned something aways back about calibrating your ESC. I don’t know exactly what you did there either. The calibration for a Castle heli ESC is done in the radio, not in the ESC. You adjust the endpoints of the radio channel to match the pwm input range of the speed controller using a linear throttle curve. And that is so the throttle responds properly according to stick position when you set up a throttle/pitch curve in your radio.
For ArduPilot with a governor, you’ll have to enable the governor in the ESC and send it the proper signal with the H_RSC_SETPOINT param. And also enable the soft start feature of it. You can set the spool and runup time with the H_RSC_RAMP_TIME and H_RSC_RUNUP_TIME params to make it easier on the geartrain and not twist the heli around on the ground when it ramps up after soft-starting.
All you will have for throttle control is on/off switch. Arm it, throw the switch and it spools up. Make your runup countdown and you’re ready to fly. When you land, it will not spool down like you’re used to with a radio throttle/pitch until you cut the governor signal with the switch.
This is fundamentally different than a “regular” heli setup where you will have Normal Mode, Idleup 1, Idleup 2, etc, and switch throttle (and/or pitch) curves with each Idleup mode.
And for auto practice in ArduPilot disable the auto-disarm and simply shut the engine down in flight. With combustion engine it go to RSC_IDLE. With electric it shuts the motor down. Do your glide and auto and if you don’t want to auto to a full landing simply throw the governor back on. It will skip the ramp and runup times and if you did your glide right you’ll have more than enough headspeed so it will be really smooth when the power comes back up to governed speed. So you’ll also want to set your ESC for an electric for fast throttle response time, and turn off the brake.
Chris,
Fair enough, I think after all my initial issues with even getting firmware installed without error I sort of jumped ahead of where i should be and have been trying to make sure i dident have a bunk board or some other issue out of my control.
I think at this point, im somewhat confident to abandon the GUI, watch Rob’s setup video, re-read the trad heli portion of the arducopter website and give it a fresh go in the morning.
Mechanically, as it was flying before with another fbl, i wasent too worried. I was confident servo horns were pretty much dead 90 to the case at center and links were where they should be, although im sure this will all be tailored to the pixhawk whilst setting centers and limits etc tomorrow when i go through setup.
Ill put channel 8 on a switch, set castle to “gov low” if im not mistaken and likely add an interlock switch “psuedo throttle hold” for safetys sake.
I dont have a normal mode on my helis. I use fbl gov on all of them and tie my 3 flat curves to three position switch for my set headspeeds. I flip hold off and it spools up, flip hold again to auto or shutdown.
I had to calibrate the esc/radio as the castle wasent seeing low throttle at first. Last i had it set up using set rpm mode with a Spektrum radio, then swapped out everything for FrSky and the esc wasent happy. Either way it arms now at low pwm. But at this point, thats the least of my worries.
Im sure after a good sit down with the unit with a fresh mind, things will fall into place better. im going to start from square one again now that im somewhat confident the firmware is loaded and i can run through a calibration without major difficulty.
Ive just got to spend some more time learning the pertinent parameters and where they are located in the full parameter list as well as closely following the recommended setup. Then i will see where it lands me.
Tim