Chris,
Post a log file so that one of the developers can look at it.
Thanks,
Bill
Chris,
Post a log file so that one of the developers can look at it.
Thanks,
Bill
2017-05-01 10-54-07.bin (2.0 MB)
.bin file MP created
Tim
2017-05-01 10-57-01.bin (736 KB)
Tim, I see inconsistent compass and inconsistent gyro errors and the accel values are not even agreeing on the bench. So you’re getting constant EKF “lane switching” going on every 2-3 seconds.
Since none of the gyros agree I’d say you got an accel calibration problem, or a hardware problem.
And what’s weird is that you have x-axis vibes being logged without even moving the heli? And zero vibes on y and z
Chris,
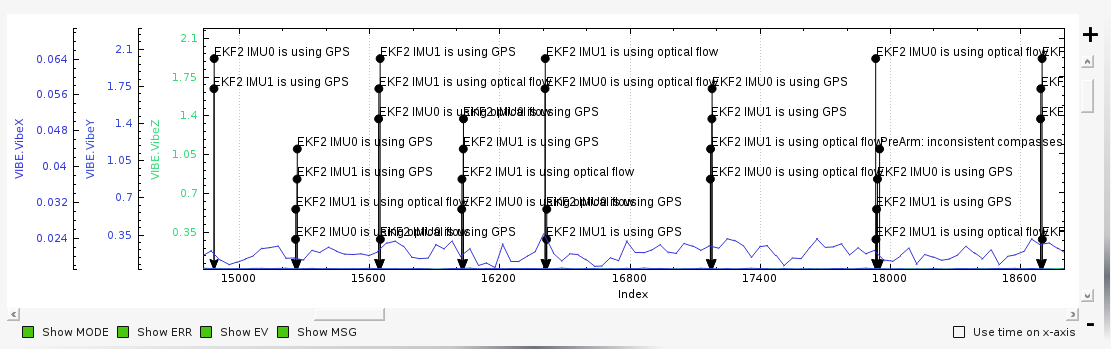
It may not be pertinent, but I noticed in the pic you uploaded it shows EKF2 is using optical flow sensor? I for sure do not have one installed and it was disabled while going through the wizard.
I’m hoping this is just a calibration issue and I don’t have a bad board. 
Tim
Oh, and while I’m thinking of it, the heli is for sure just sitting on the bench, occasionally I move the servos to check for proper movement, and I believe one or two times I picked up the heli and moved it to check compensation. For the most part though it is just sitting there.
Tim
What wizard is this? Is there a wizard to set up helicopters in Mission Planner? I’d be very leery of any wizards because they’re usually designed for multi’s.
Chris,
I’m probably mis-using the “Wizard” term. It’s more the steps you go through initially setting up the unit after the firmware update. Takes you through compass and accelerometer calibration as well as what power module you use and other attached sensors, like optical flow, which I for sure do not have and did not check the box for it.
Tim
Oh, ok. Yeah, that’s normal. And I know there is a heli page in MP that APM Planner doesn’t have. I’ve never used that so can’t comment on it. I just do all that initial setup stuff and then move right to the Full Parameter List and work from there.
On the optical flow issue, lots of stuff has changed in 3.5. But as far as I know setting EK2_GPS_TYPE to 0 and EK2_ALT_SOURCE to zero should make it just use GPS for 3D velocity and 2D position, and use the baro for altitude. EKF3 should be turned off by default. If that doesn’t rid of the EKF trying to use both GPS and optical flow at the same time, then I’d have to go thru all the release notes for the RC’s and see what they’ve done there, or ask the question on the copter 3.5 part of the forum and see if you get Randy to give you an answer.
I got kinda out of the loop on 3.5 because I went to testing some 3.4 code and I have to catch up on all that.
I have heard of some issues with MP sometimes lagging the RC’s a bit but I would find it hard to comprehend why that would be the case on the accel cals. You definitely have an accel problem. And disable those other compasses. I’ve used the internal compass in Pixhawk on one heli I think and it worked ok. But it normally doesn’t and just have the external. So to prevent problems with the compasses, disable the internal ones.
Try another accel cal and make sure the thing is not moving at all when you do each step. You mentioned trying to do it with the FC installed in the heli being a challenge. If you did it and the heli was moving because you were holding it while doing the cals, that might cause an issue. So try that again - set up some blocks or something ahead of time to set it on for each step of the cal. It’s hard enough to get two IMU’s to agree sometimes, much less three of 'em. If necessary, take the FC off it and do it on the bench, reinstall it and adjust the AHRS trims later to compensate for it not being true and square with the mainshaft.
Also Tim, if you get a chance, could you export the param file from your Pixhawk2.1 - you do that the Full Parameter List. Then post it so I can review it to make sure there’s not some other cruft in there that needs to be turned off. I got mine saved from flying 3.5 so I can easily compare what it took to get it to work.
Chris,
will do Thanks!
Tim
Ok, good. I see inconsistent compasses and inconsistent gyro messages, which causes the EKF to have issues. It’s just like the accels aren’t calibrated at all. And that could be an issue with either the heli moving during the accel calibration so it’s trying to capture a moving target for the cal values. Or an issue with MP being one step behind and not properly writing the cal values to the FC. And I’m thinking that whatever “wizard” you used didn’t properly turn off the optical flow, so since it has no GPS lock, presumably indoors, it’s trying to switch to optical flow because it thinks GPS has failed.
So need to fix those issues and get the accels calibrated so they all agree. And then I think stuff will start working.
I don’t see any indications of a hardware problem. I see the GPS was identified and connected at 9600 baud, so that’s wired right. And I don’t see any errors about unhealthy hardware. Just that stuff is not agreeing. Once you get those accels calibrated, the EKF should be a non-issue for bench testing and don’t worry about that until you run the heli up and see what you got for vibration issues.
Tim,
I saw that you said you used the wizard in MP to set up your aircraft? Go to the ardupilot website and follow the instructions for doing the compass cal and accel cal. This is the link for the configuring hardware. These instructions use mission planner to show how to do it. I’m concerned that the wizard gooned something up.
Bill,
In regards to the “wizard”. I was calling it that inappropriately. Its just the steps, like calibrating accels and compasses as well as selecting hardware you have like flow sensors or power modules, you go through after uploading firmware.
Unfortunatly my lack of proper nomenclature adds some difficulty in explaining what i’m doing. Although, i am studying available material so hopefully it improves.
I really appreciate all the help.
Tim
There actually is a wizard in mission planner for initial setup. That is why I thought you were using it. I personally don’t like it.
Bill, I was concerned about that too. And then I figured out Tim was talking about the basic cal screens. I am concerned, though, that the heli setup screen in MP might not work right with 3.5. I don’t know that for sure, but if I could see the param file from the heli it would tell a lot about what’s gooned up. I want to get that param file, then have Tim do another accel cal and get another param file and see if MP is even writing the values to the FC.
Unfortunately, most of the ‘features’ in copter are written for multi’s and not helicopters. And unless you go to the Full Parameter List and reset to default after you load different firmware, the settings from the previous are saved. Since Tim loaded Plane, Rover, Copter, etc., need to verify the settings for heli are still there and haven’t gotten mucked.
Chris,
I’m not sure you are able to do this in your planner software but when I view a log in mission planner, I’m able to scroll through each line of the log. The first 100 lines or so is the formatting of the messages but after that before the data is the parameters. if you are able to search on a message then do a search or filter on PARM and that should get you his settings.
timbaconheli trex800 pixhawk 2.1.param (11.0 KB)
I uploaded a copy of the parameter file from “full parameter list”, i’m assuming this is what you are looking for?
Thanks,
Tim