Alrighty,
So this unit is a hot mess. I reloaded the firmware after about 10 attempts. Loaded 3.46 then back to 3.5. On the whole it all seems very buggy and sometimes the servos move, others they dont.
Now after loading a fresh 3.5, i go into heli setup and i cannot adjust the servo positions anymore? The rev boxes are un-clickable.
Also, now the unit boots, green light flashes then it goes dark. Light on the GPS is still flashing.
Are there any settings or data stored on the SD card that could be botching this up?
I followed the online instructions for Pixhawk 2.1 firmware upload and such.
It should be noted i reloaded the firmware because the unit was acting very very buggy and not connecting properly and locking up MP.
Also, MP updated itself today and it is acting buggy as well.
Tim, all I know it is not the firmware. I have loaded 3.5 in two different helis and flown it. Reverted back to 3.4 with no problems to do some further testing of other code. Reloaded 3.5rc4 in another one today. And have none of those issues with a Pixhawk 1.
I should note I am not using Mission Planner. I either download the firmware binary, or build it from the appropriate branch, and install it and make all my settings with APM Planner2 on linux, since I do not have a Windows computer. I am not that familiar with MP, unfortunately, and have never used the heli setup page in MP. So can’t really provide much advise on that aspect.
Yeah, i dunno. I went through everything step by step, swapped the usb cable for a very high quality one i use for some hifi work to eliminate that, reverted MP back to the previous version, calibrated compass’s and accelerometers etc and it boots and loads into MP now, servos work mostly, but strangely enough they just go silent occasionally with no response to stick movements, its acting like its rebooting?
Im assuming its logging while one the bench? And if not im guessing that can be done? That would be a helpful thing i believe.
As ive said, it just all seems very buggy. It may well could be some ill placed settings somewhere as well? Unfortunalty in my infancy im not good at aiding my own diagnosis.
Tim
While im thinking about it, what function does the sd card serve? I understand it is for logging, but i kept getting “no heartbeat packets” and “no heartbeat io” and realized i had bumped the sd card when hooking up the usb cable.
Im going to spend a few more hours reading before i dig in to this again, that being said, i did watch Rob’s video, and it all makes sence but its hard to replicate when the unit keeps going haywire and seemingly re-booting all the time…
Tim
Boy, I don’t know what’s up with that, loosing servo response. But if it’s like Pixhawk 1 or APM it will only write a log to the SD card if it’s armed. You should get a telemetry log, though, in your ground station every time you connect to it.
Does it say you actually have the heli firmware in it in the messages in your ground station? Some folks have accidentally loaded the wrong firmware before.
Tim,
If I’m not mistaken, I believe the SD card holds the firmware and the logs. So it is essential for the system to work properly. I’ll try to look at your posts tomorrow but be sure that the SD card is seated properly.
Chris,
Yeah im quite certain that 3.5 for heli is currently loaded. It is displayed at the top of MP, and also i have the “heli specific” tab in MP for configuration.
Tim
Bill,
I figured the log for sure was on the SD card, was wondering about the firmware though. Having had many cards die in the past, both high quality samsung evo cards and cheap knock off ones, i would think the firmware would rest in some from of persistant onboard flash with just parameters in the SD. I’m definalty doing some reading at the moment trying to peice this together better, or at least gain a bit more understanding.
I just know its definatly acting like somethings wrong, had enough things mess up over the years and the intermittent nature of whatever is causing the servos to all check out for 10 or 20 seconds and then come back like nothing happened has me wondering.
Tim
Did just that. Also tried plane and then back to 3.5 copter.
I finally have a somewhat working firmware, just acting weird locking up the swash and the servos stop working/responding for a bit, 15-20 seconds and then back to BAU.
The first go around it dident act that way. Then it stopped responding to my radio commands, couldent even see the bars move in MP. I verified the receiver was still good and then deceided to reflash the firmware…10 times before it worked again.
Tim
Unless they did something radically different with Pixhawk2.1, the only thing that gets written to SD card is the logs. I’ve flown Pixhawks without any SD card and they boot and run fine. The firmware and params are written to internal flash memory.
I did have a Pixhawk once that did some of the same things you mention - it wouldn’t respond on MavLink. Couldn’t get the servos to respond. Could only basically connect to it with the USB cable. I found the GPS wired wrong out of the box. Fixed that, and it was fine.
Just on a hunch, unplug your GPS and try it and see if the problems go away.
Bill,
Thanks for the info, ill set that parameter and see what gets logged. Im hoping that helps a little as the error messages that pop up in MP are usually fleeting glimpses as they are stackes up on eachother.
Tim
I am also getting a lot of EKF2 has stopped aiding and BAD AHRS errors in the flighjt data screen of MP just prior to the servos not responding. if I go under the radio tab I see that the green bars are still moving with stick commands.
Tim
Tim, the AHRS is the Altitude and Heading Reference System. I don’t know why that would be borking on the bench if the accels and compass are all calibrated and the heli is not moving, and not even armed. That almost sounds like a faulty IMU. The EKF stops aiding because the IMU’s don’t agree. I only recall getting those error with a unit that has not been calibrated yet.
Chris,
I just noticed the error this morning while testing. I had just recently gone through the initial setup last night and everything seemed to go smoothly, all the calibrations were a success according to the software.
Tim
I do not think that should be happening with a calibrated unit just sitting on the bench, unarmed. Maybe one of the devs that is more familiar with that system will comment. But I think I’ve only seen that with an uncalibrated unit. And yes, that would likely cause the servos to stop because it means the Pixhawk is confused about its orientation, I’m pretty sure. How many compasses is that system using? You could try disabling compass2 and compass3 (if it has that many) with these params - just set these two to zero and it will only use your external compass.
COMPASS_USE2 , 1.000000
COMPASS_USE3 , 1.000000
But on the other hand, you should be getting inconsistent compass errors too, if that’s the case. So I don’t know.
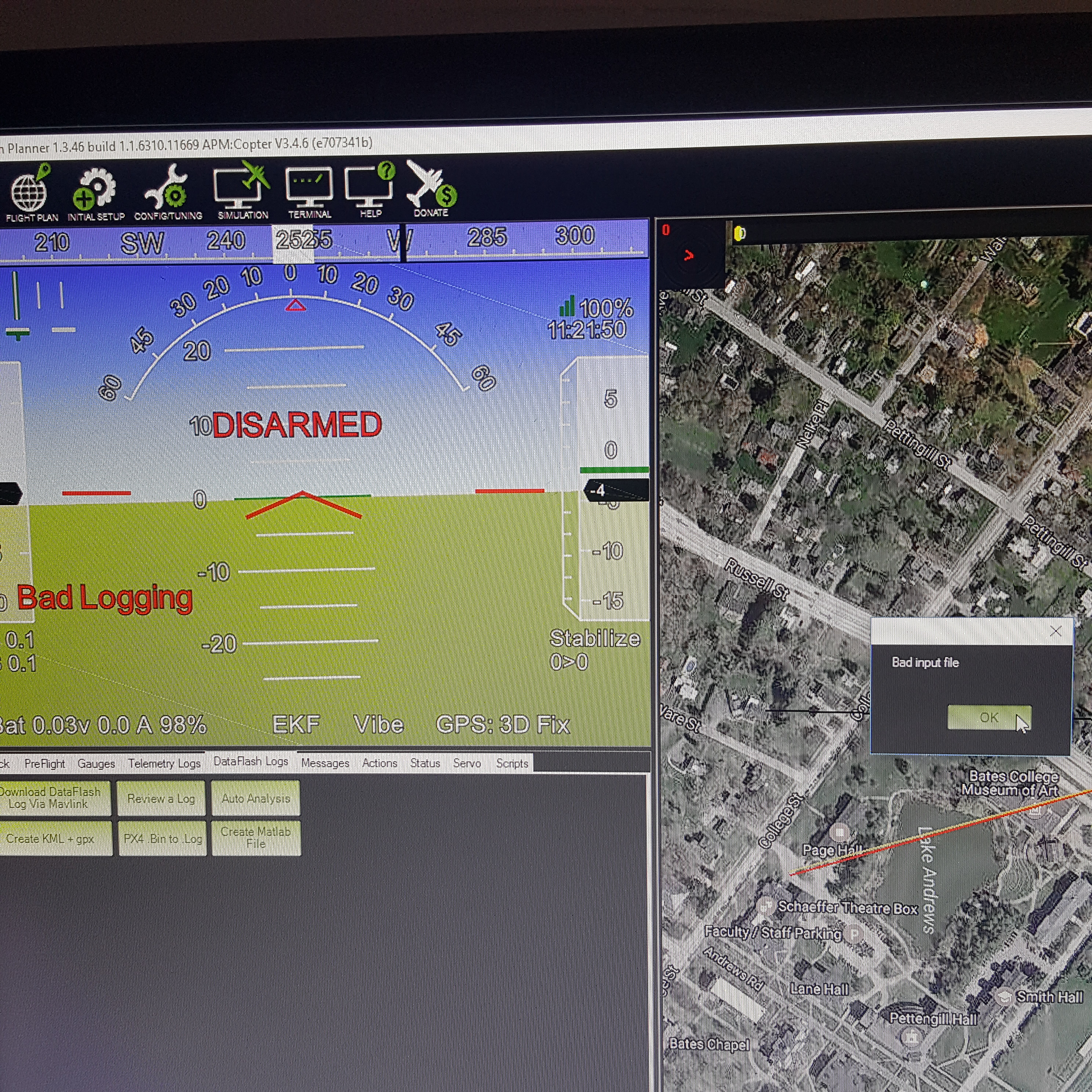
I set logging on the bench, went through the process of checking and playing with settings. Downloaded the logs and attempted to analyze the data and i get this.
Chris,
Its showing 3 compass’s in MP, i went through the live calibration last night after a fresh firmware install and it set the offsets. I will try disabling all but one.
The horizon displays correctly in MP if thats any clue?
Ive calibrated accels and level a few times now.
Tim