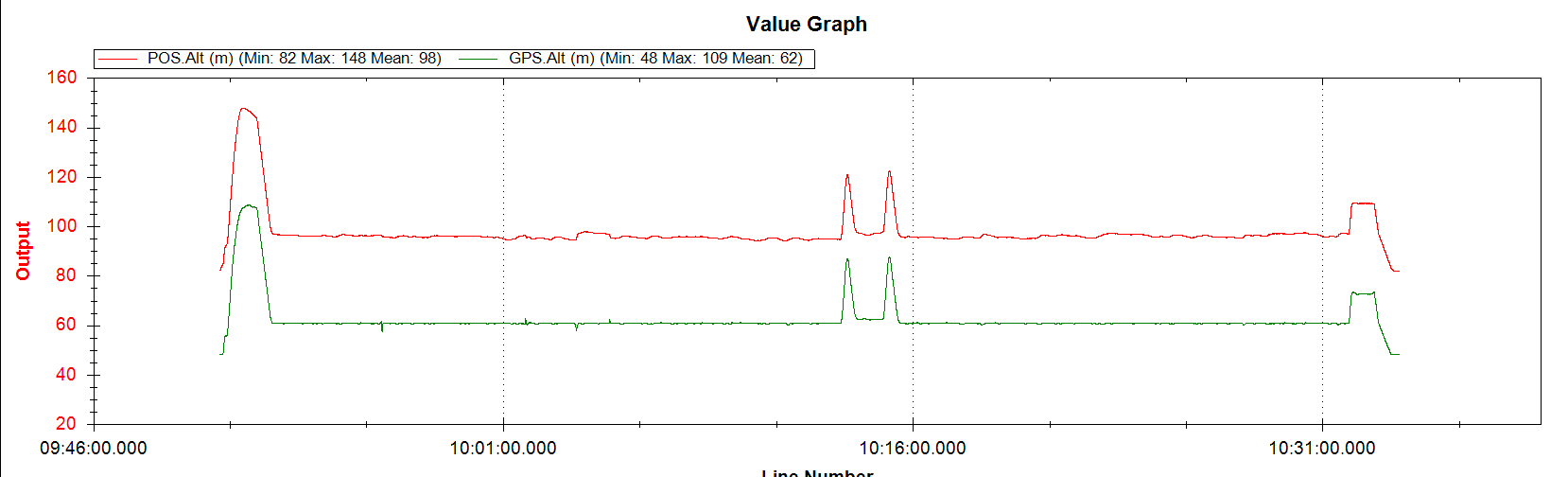
According to the instructions, the POS records the WGS84 altitude calculated by the flight control system, and the GPS records the WGS84 altitude, but the difference between the two altitudes is relatively large.
Version: Copter-4.0.7
Using GPS Yaw.
Log:
https://1drv.ms/u/s!AtY6Wtn1T07Bb9cPgEu3hv8_t2s?e=1VzZpi
Thanks!
Those are very different:
- POS.Alt is relative to Home.
- GPS.Alt is WGS84 AMSL relative altitude.
Which instructions are you referring to?
But using the compass to fly POS.Alt and GPS.Alt are basically the same.Is the height of the home point where the Copter when arming?
Yes exactly, it will be roughly similar to baro altitude. And GPS Alt will be AMSL
But it seems that POS.alt is not the altitude relative to the home point. The source code shows the AMSL altitude calculated by the Copter. CTUN.Alt is the height relative to the home point
Sorry, my mistake entirely. Pos.RelHomeAlt and Pos.RelOriginAlt will be similar to baro alt, and as you say POS.Alt will be GPS Alt or AMSL
It’s OK. This question is very strange, I think it may have some problems with using gps yaw.