
Countless hours of community effort has culminated this month with ArduCopter 3.5.0 being released as the first production copter version that is fully compatible with the 3DR Solo using a Pixhawk 2.1. The Solo can now progress along the leading edge of sUAS technology with ArduPilot!
The Beginning of the End that Wasn’t
When 3DR abandoned the consumer and DIY sUAS industry, many people put up RIP signs next to their Solo. There was no further development in sight and users resigned themselves to being stuck with “it is what is”. ArduCopter master was meanwhile making leaps and bounds with new enhancements that everyone wanted but nobody could have.
However, many users and developers were not ready to give up as quite as easily. If 3DR won’t keep the Solo alive, the rest of us will. Hardware developers, firmware developers, GCS developers, and beta testers all hit the ground running to make it happen.
Heart Transplant
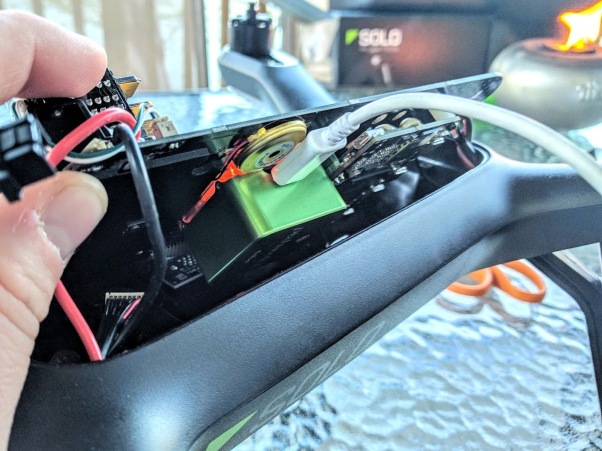
Philip Rowse (@proficnc ), the developer of the Pixhawk 2.1 cube, created a variation called the Green Cube as a bolt-on replacement for the Solo’s stock (and basically obsolete) Pixhawk 2.0. Upgrading the Solo’s hardware to the Pixhawk 2.1 Green Cube opened the door to beginning the ArduCopter firmware changes. Important note: The Pixhawk 2.1 Green cube is required for safe and reliable operation of ArduCopter 3.5+ on the Solo due to the required 5v PWM signalling!
Solo Remastered
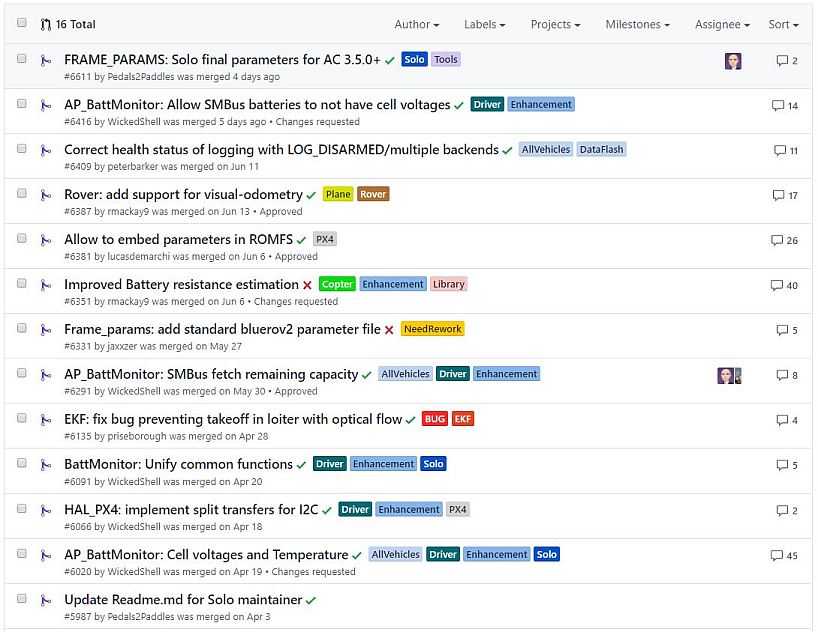
The already very busy dev team at ArduPilot along with several other so-inclined users helped create and merge patches to fix incompatibilities and add new features. As always, the Mission Planner GCS was updated rapidly, keeping pace with the firmware changes. The “Solo Remastered” project was a weekly topic on the ArduPilot developers conference call. They also had the patience to put up with me learning how GitHub works, making every newbie mistake possible submitting PRs. I am personally quite thankful for their help and I learned a lot from them.
Solex GCS App
Kelly Schrock (@kellyschrock), the developer of the Solex GCS application for Android was on the ball pushing out new updates to work with ArduCopter master’s features and functions on the Solo. The Solex app has become the defacto standard GCS app for the Solo since 3DR abandoned their applications a year ago. Solex has continuously added new features and improved existing features since it’s launch. Solex has also made the upgrade to ArduCopter master as quick and painless as possible with a firmware upgrade function developed around the process.

Smarter Smarts
Numerous changes to the Solo’s smart shots and other python driven functions were required. Some were bugs to squash. Others were for compatibility with ArduCopter. For example, the “return to home” python driven mode was discontinued due to complications and compatibility issues. Anything that used to initiate that function now simply activates ArduCopter’s native RTL mode. This eliminated several points of failure.
The Bleeding Edge of Beta Testing
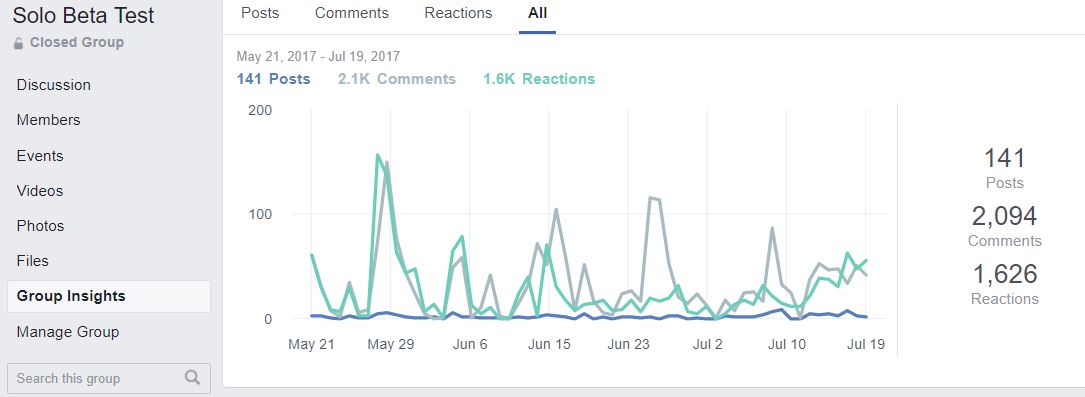
Many beta testers sacrificed their time and money towards this project. They purchased the Pixhawk 2.1 Green Cube knowing they were buying into an experiment at the time. They were eager to try out and stress test the changes and patches. Some quite literally sacrificed their copter for science, flushing out the bugs and incompatibilities. There were no instructions or procedures to start out with on day one. We were finding out what worked, sharing it with the group, improving it, and writing the instructions as we went. There are now Solos cruising the skies with RTK GPS, lidar altimeters, ADS-B avoidance, real time battery management, and terrain following missions. All of which was not possible a few months ago.
Solo Lives On
With the Pixhawk 2.1 and ArduCopter 3.5.0, the Solo is back and literally better than ever. It is no longer bound by heavily customized firmware or incompatible hardware. And it now has a robust and growing GCS application. As ArduCopter grows, the Solo grows with it and the possibilities are endless.
More Information & Resources
ArduPilot Wiki for the Solo upgrade
Solo Beta Test group on Facebook
Pixhawk 2.1 Green Cube direct from ProfiCNC
Pixhawk 2.1 Green Cube from Jesters
Solex App / Solex in the Google Play Store
