shinnoji
March 28, 2025, 3:21am
1
Hello.
As the title says, the drone landed and then took off again on its own. I have set up the flight plan as follows
TAKEOFF 2m
DELAY 3s
LAND
In the simulation, it executed this plan and then DISARMED and stopped, but in the actual machine, it worked as per this plan and then started flying somewhere.
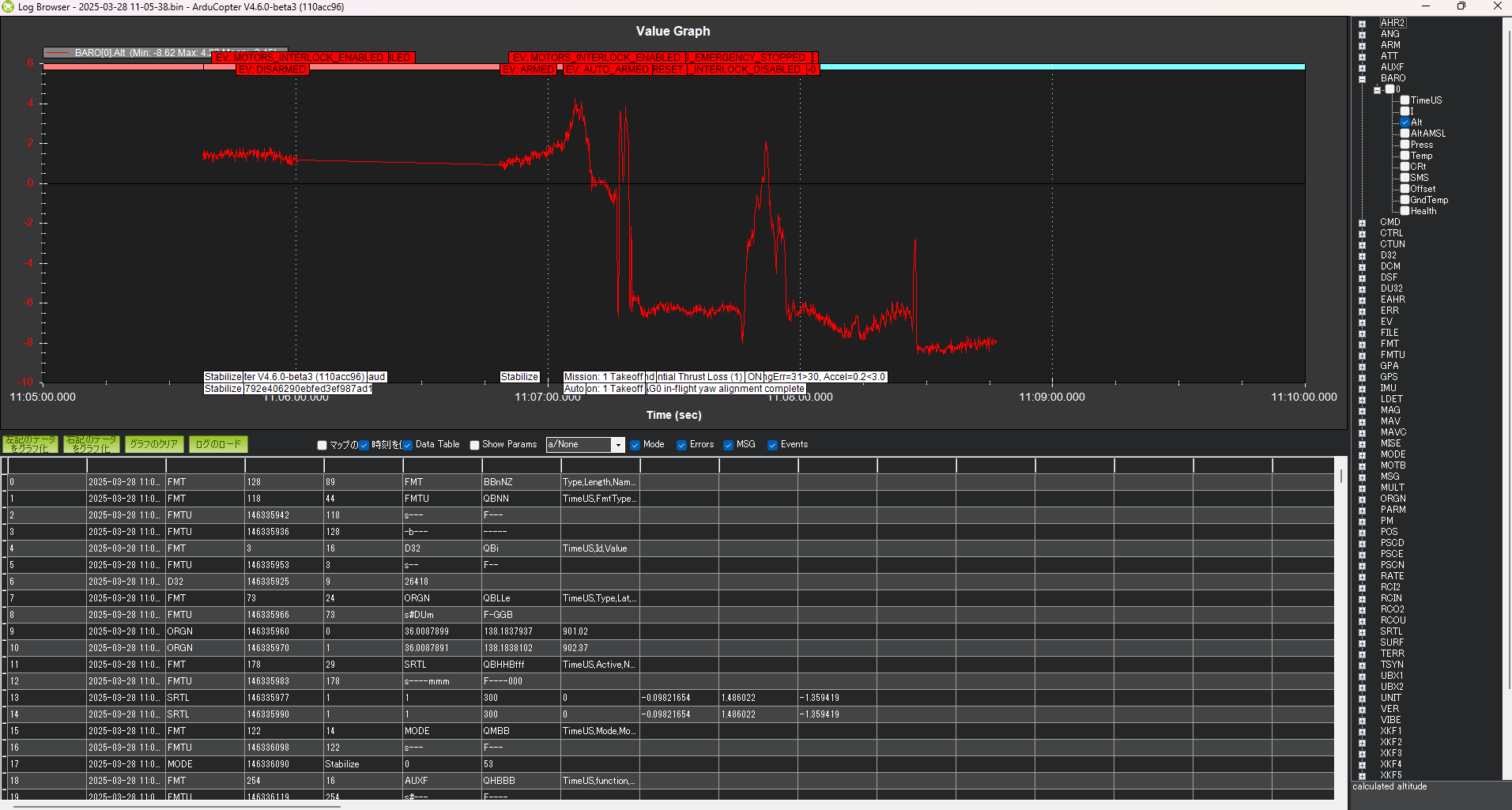
This is what the log on the BARO alt looks like.
I am attaching the bin file just in case.2025-03-28 11-05-38.zip (938.9 KB)
I would appreciate any advice you can give me.
Thank you in advance.
shinnoji
March 28, 2025, 7:38am
2
I am pleased to report that progress has been made.
I reviewed the above data and set FS_THR_ENABLED and FLIGHT_OPTIONS to 0 because it was listed as “trust loss check”.
This resulted in a cleaner and slightly better display than the above data, but mission1(TAKEOFF 2m) was executed again.
The flight plan is generally the same as before, but I changed DELAY from 3 seconds to 10 seconds.
The data at this time is attached here.2025-03-28 15-28-51.zip (561.5 KB)
I have not done anything on my part, but I would like to know what caused mission1 to be executed again.
Thank you in advance.
Allister
April 11, 2025, 2:43pm
3
None of the basic tuning has been done to this drone. You should be pleased it’s flying at all in an auto mission.
Follow the links and information that was given to you in the other thread.
2 Likes