hey guys! I have a cube orange and I’m trying to set 5 lidars to work with it. (front, back, left, right, down).
At the start, I tried using Terrabae M15 but for some reason, that configuration only seemed to be working on cube black. (I think there is a problem with the H7 architecture and I2C).
Anyway, I ended up using TFluna and TFmini that I had lying around.
And now, I can’t make either of them work. I can’t remember what are their addresses and I’m really struggling with communicating with I2C commands.
I saw that there are 2 modes (UART, and I2C) I need to use the I2C because I’m trying to set 5 different lidars on different addresses. what are the commands to change addresses for example (1,2,3,4,5)
If you could help me get any of them to work, I would really appreciate it; that would mean the world to me.
I am no experton TF Mini’s but I did write up some directions to get it to work if this helps.
So here is how to get the TF Mini Plus working on Pixhawk I2C.
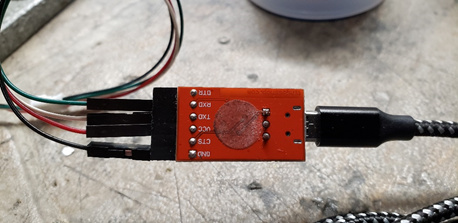
Connect your TF Mini via the supplied cables to a TTL to USB adapter.
Connect via the USB cable to your PC.
If you have not already downloaded the TFMini Gui…do so from 北醒
Open the Gui
Set the product type to TFMini Plus
Select the correct Com Port
Click connect.
You should start seeing distance information on the graph in the gui.
Using the command line function issue the following two commands by pasting each in the command line and pressing send
5A 05 0A 01 6A
5A 04 11 6F
The first sets the device to I2C and the second forces a save.
Nothing should appear on the graph from this point on.
Next you need to connect it to your Pixhawk or I2C hub.
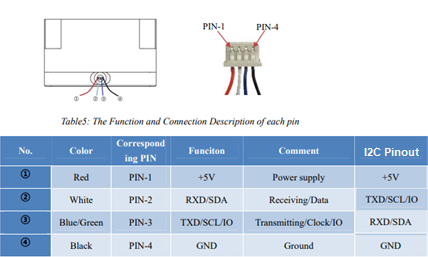
Please note that the pinout on the supplied connector has the SCL and SDA reversed. You need to pull out the pins and swap them.
Please note the SCL and SDA are reversed.
You need to configure a few settings in Arducopter.
RNGFND1_ADDR,16 This is the I2C address for the Lidar
RNGFND1_GNDCLEAR,34 This the distance from the Lidar to the ground…easiest way to set it is to have the drone report the distance to the ground when sitting on your workbench and then enter that distance.
RNGFND1_MAX_CM,600 Set this as the max distance the device will be used.
RNGFND1_MIN_CM,30 This is the minimum distance for the lidar.
RNGFND1_ORIENT,25 This is telling Arducopter that the lidar is pointing down
RNGFND1_TYPE,25 This sets the lidar type to TFMini I2C
It should be working now.
Good luck
Thank you very much for the detailed information.
I already tried using these I2c commands but when I press enter to send the command I get an error message saying that the command I’m trying to send is not valid and to check it again.
I can’t find the commands that change the LIDARS from UART to I2C mode. if you have any idea what are the commands that do that I will be thankful!