thank you Randy and Patrick for all your hard work on the TF mini
1 Like
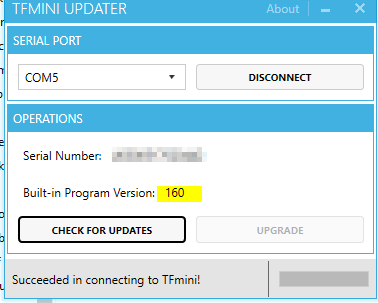
Really curious that the -my- updater show a completely different number… Version 1156 and after updating: 2156
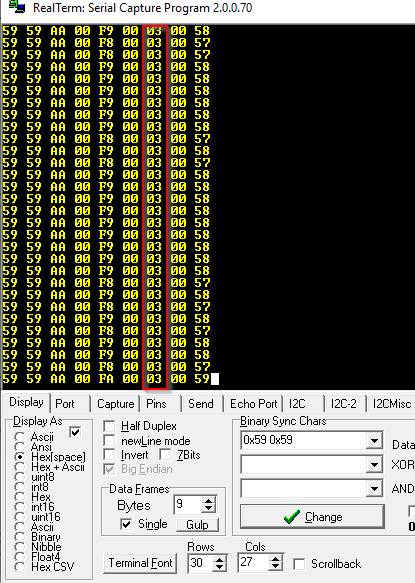
At what distance does the mode 03 pops in ?
And does it works OK with the 02 check code removed ?
My TFmini also only shows modes 3 and 7. It switches to mode 7 at 1m and then back to 3 under about 60cm… so there’s a deadzone from 60cm to 1m where it will just stay in the mode that it’s in.
I hope to push out 3.6.0-rc4 later today. Txs!
P.S. it would be interesting if we could do the tfmini lidar firmware updates through the flight controller (i.e. serial pass through). It’s theoretically possible although it would depend upon the GUI tool being happy with the flight controller’s COM port id.
1 Like
@rmackay9 please note that i just lost a TFMINI while trying to revert to an older firmware release using the old flasher (that allowed to select the desired bin file)… bad idea.
So for the moment I would suggest that we just add a note on the wiki about flasher tool provided by BENEWAKE to update to latest firmware in case the driver is not performing according to specs.
The good thing is that with the latest firmware updates they have almost eliminated the overestimation at short distances.
2 Likes
Sounds like we are getting closer
1 Like
hi, i know it was considered a long time ago that 600cm is a reliable distance - but, is it really true? i tried to fly using 1100 there instead and comparing data outdoors i found that it was actually working fine in this whole interval. it has a factory defined 12m distance range - why do we limit it to 6m in the params? should it be revised, perhaps?
1 Like
Hello Paul_Atkin1
I hope you explain me well my english is very bad
Theoretically outdoors you have to limit the scope to avoid bad information.
for example: When you pass from a height of 8 0 9 meters the drone starts to climb only to descend only, In short, height accuracy fails.
If I’m wrong that the rmackay9 and ppoirier experts correct me
regards and I hope to have you clarified your doubt
1 Like
@Paul_Atkin1 & @nomar nothing is better than test it yourself 
Connect the TFMINI to your laptop and take a walk outdoor while testing with the Benewake utility.
The test I made a few month ago prove that beyond 7 Meter the signal was lost and even worse on bright sunlight.
2 Likes
i will retest it, but i tried to raise it to the level of 20m gradually in alt hold and it was doing it, staying correctly at the desired altitude, i then looked and compared baro and rngf logs and altitude was matching there with no obvious errors, to the limit of 12m. i will try to retest again. may be it is different of different ground surface, who knows. good to know about sunny days, i will try to take that to consideration too.
1 Like
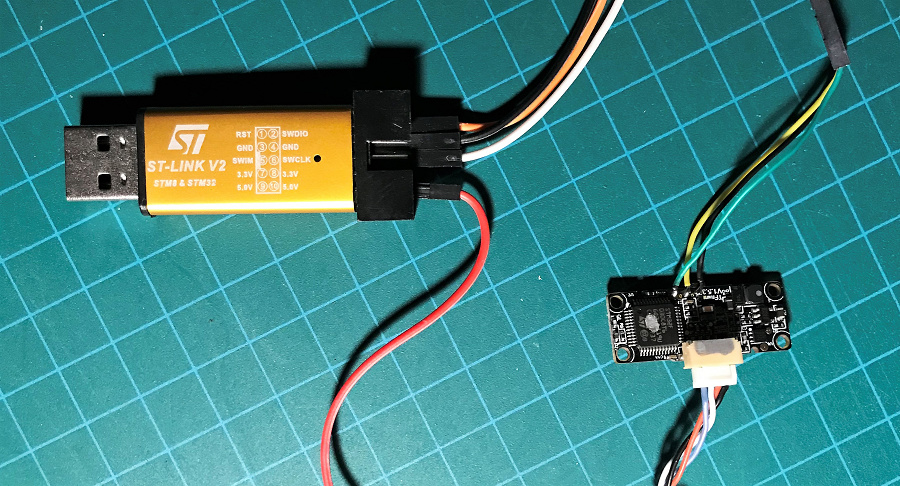
@rmackay9 Yahoo !!! It’s back to life 
This is what I like , push the thing to the limit, brake it and fix it !!
I notice there were programming pads on the board, and looking more closely it happened to be exacltly this. So I soldered jumpers to the pads and hooked up the St-Link in order to reflash the unit and Voilà …
3 Likes
Hi everybody.
I’m using tfmini throught I2C using the maxbotic driver.
Is the issue described here affecting to my pixhawk 2.1 ?
Thanks.
No, this thread is related to native serial driver
To reflash ? , I used the STLINK utility software, copied the bin file from a working TFMINI and flashed it back