Over a 4 minute test flight, the M10 seemed to work fine.
I’m curious is this might be something that the uBlox folks might be interested in seeing. But without knowing what these error message are saying, I can’t present it to them.
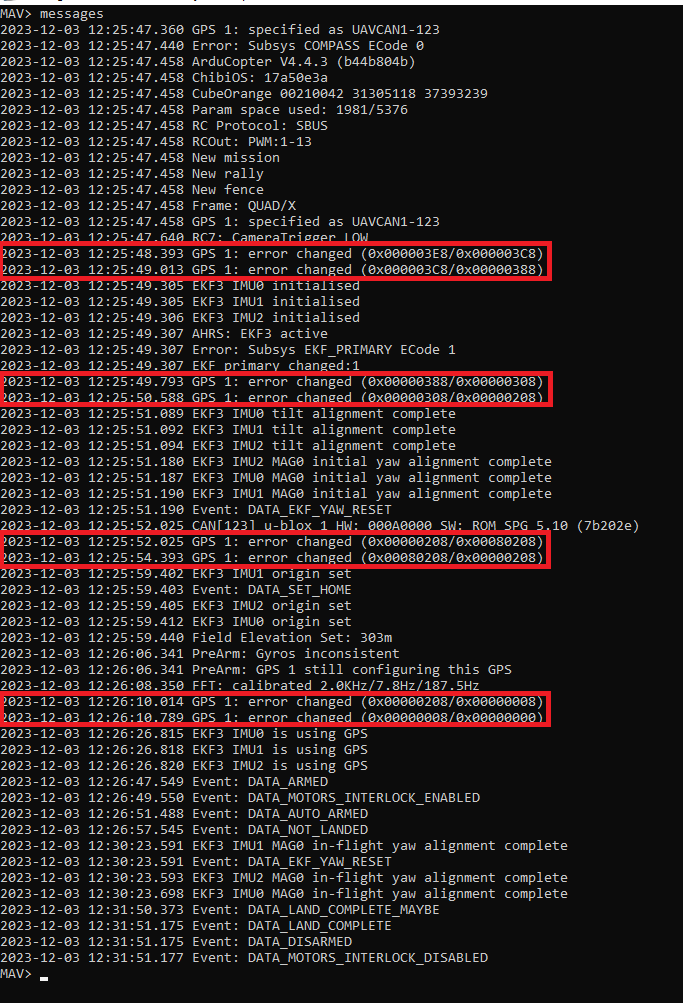
I suppose it’s failing some configuration checks until it doesn’t and you get the “EKF3 IMUx is using GPS” and it’s good to go. Like the Gyros inconsistent messages it takes a short time to work out.
A helpful person over on the uBlox Portal side dug this out of the code base:
I’m not sure this is the correct instance of code that generated the messages I received. The messages have hex values on either side of a “/”. But my limited understanding of the code says that the same variable is being used for both values. But the messages I got have two different hex values.
I gave up coding over 20 years ago - so maybe I’m reading this wrong. If not - I’m thinking some other statement is generating the error messages I received.
Regardless - I still need to know what test was passed that allowed the conditional to succeed. (i.e. what’s going on - or wrong)
Hey,
“its just a harmless diagnostic to help me diagnose issues with configuration of GPS modules.”
-Andrew Tridge.
I had similar query few months ago.
I have recently started seeing these GPS error messages on Here3+ modules as well…but not on every copter despite supposedly identical hardware & software…
I would fully endorse any change that keeps the user base from chasing red herrings.
I’m still curious about what is triggering this specific message. I assume the error condition clears. But what would happen if it doesn’t? If the error never clears and the startup stalled because of it, you might need that message.
I’m wondering if the message still appears if you haven’t enabled logging when disabled.
The only reason I’m probing this is because I’m trying to do my best on evaluating this M10 GNSS. I’m thinking it might be a good choice for my foam board fixed wing projects. But as the M10 units are new - I don’t know if there are potential issues.
This is why I’m digging into all this - I want to know if these messages suggest concerns about using this M10 GNSS for a flying vehicle.
It’s not an error, per se, but an error code state change (in this case, very likely changing from not initialized to initialized, but I haven’t dug that deep, nor will I). You can indeed see that the last message includes all zeros, immediately followed by “IMUx is using GPS” messages, indicating all error bits have cleared. You are chasing a red herring.
And you are indeed reading the line of code incorrectly - it uses the same hex format string for two variables (comparing previous error state to the newly changed one).
There are plenty of vehicles using the M10. AP has supported it for well over a year.