I was flying in ALT HOLD mode and suddenly the quadcopter went crazy!!
It cost me hundreds of dollars, my pride, and hours of hard work. 
It is critically important for me to understand what has happened and how can I avoid such a disaster in the future.
I really appreciate if someone can help me understand the reason.
00000025.BIN (278.8 KB)
Sorry about your crash, that’s certainly no fun. I guess in this case “went crazy” means the vehicle lost yaw control and began spinning quickly… at least from looking at the logs it looks like it lost yaw control.
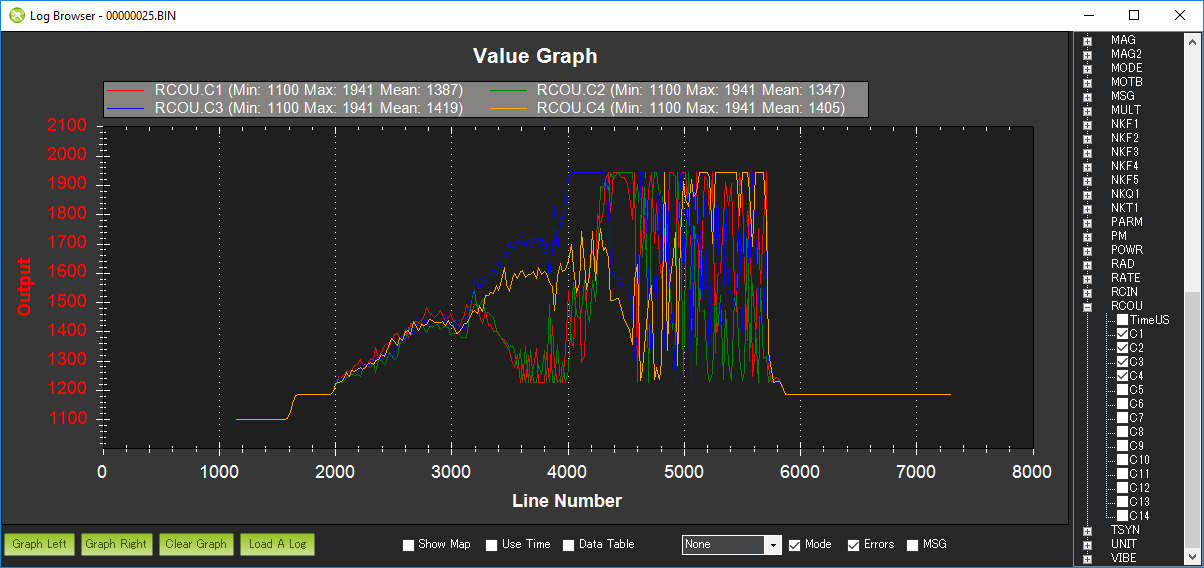
It is very likely a mechanical issue, in particular motor 3 (front left) looks very suspicious because it’s value goes the highest before the crash. We can see from the graphs below that the clockwise motors (3 and 4) go high while the counter-clockwise drop to their minimum. Perhaps double check that the motor order and propeller directions are OK. It could also be that a propeller came lose (most likely motor3’s) in flight.
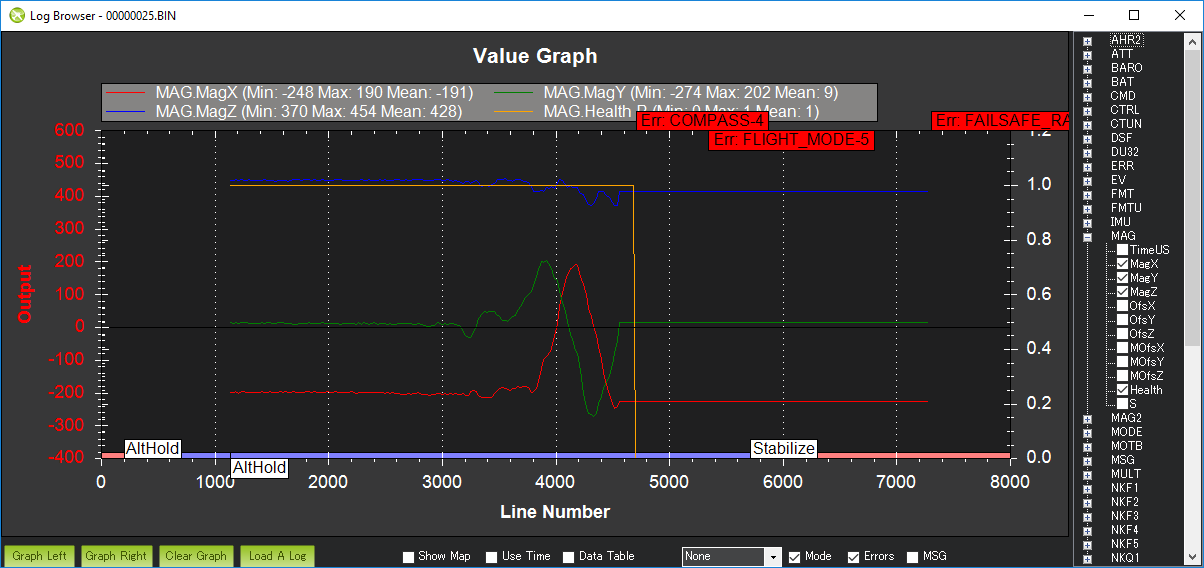
The compass becomes unhealthy around line 4700 but this is after things have gone badly and is likely because of the crash.
@rmackay9 Thank you for your analysis and reply.
It was not the first time I was flying this drone so I am not quite sure if it is totally mechanical.
from “Went Crazy”, I mean I lost the control. It didn’t spin (maybe just about 90 degrees), instead, it started climbing very aggressively. Although I brought down the throttle ( please check rc3_in and Alt). It kept increasing altitude until it hit the ceiling ( we have a huge lab with a very high ceiling) - I changed the mode to stabilize but it wasn’t coming down until the battery blow and it smashed down to the ground.
If it was just some spinning and hitting the wall it made sense due to “unhealthy Compass” but, the copter was totally out of control and that was really scary.
From my experience, Throttle, pitch, and roll were totally unresponsive.
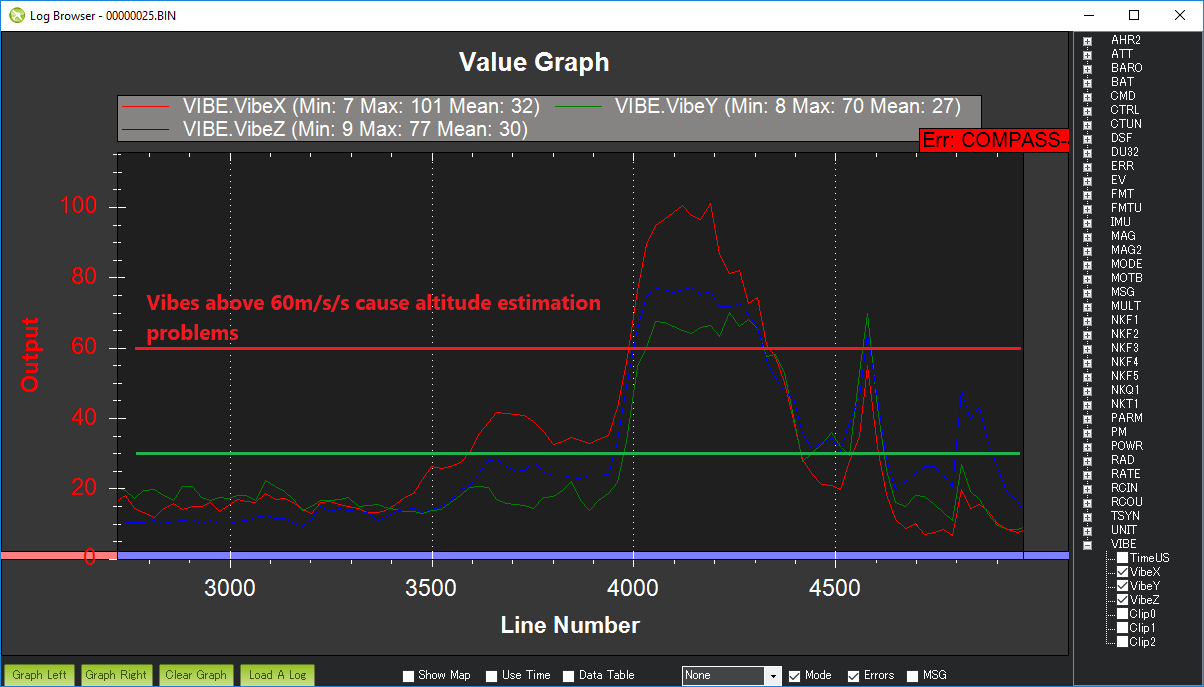
OK, thanks. That short description really helps cut down the time to get to the cause. It’s very clearly high vibration levels. These vibration levels really need to be kept below 30m/s/s most of the time but on this copter they are climbing to 100m/s/s.
There’s some advice here on measuring vibration levels and another page with some suggestions re vibration isolation. My personal favourite is the 3M foam sold by mRobotics. Alternatively some flight controllers like the Hex Cube and CUAVv5 include vibration dampening.
We do have some ideas for adding a high-vibration failsafe to reduce reliance on the accelerometers (which are clipping) and increase reliance on the barometer but this won’t be complete until (at least) Copter-3.7.
2 Likes
Yes. As you mentioned Vibration is too much and I also believe that is one of the reasons contributed to the crash and thank you for your suggestions about damping the vibration. In your idea, what is the reason for a compass to go “unhealthy” all of the sudden? Because that contributed in sudden increase of vibration.
The compass goes unhealthy at around line 4700 which is long after the vibration levels have subsided (the line number range shown on the bottom scale is different in each picture).
The cause of the increased vibration levels is more likely the increased throttle. without good vibration isolation a feedback loop can happen where high vibration leads the EKF’s altitude estimate to become incorrect (normally in these situations the EKF reports that it’s falling), this can then lead to the vehicle increasing it’s throttle which leads to even higher vibrations.