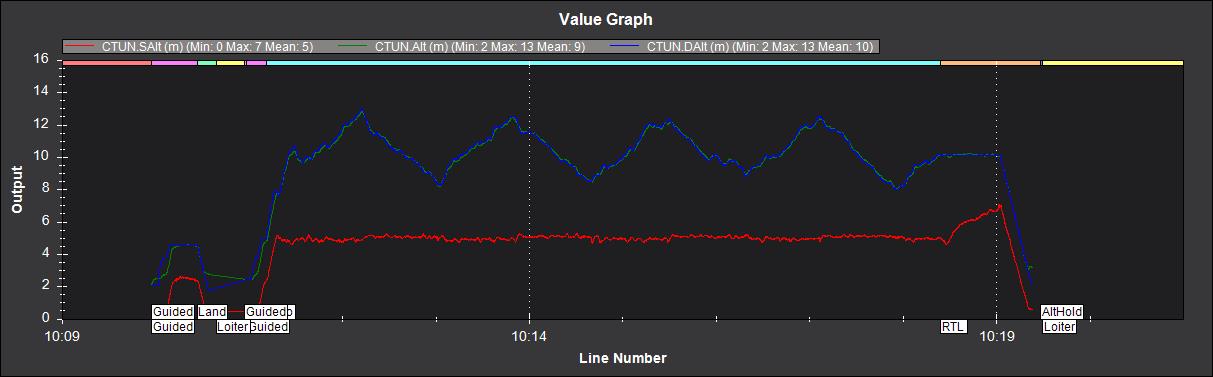
I am using uLanding RangeFinder. I am able to get it to work for AUTO, Loiter, AltHold and guided mode. But during RTL somehow copter is not taking rangefinder data and instead is using Barometer data.
TERRAIN_FOLLOW is 1.
Log: https://1drv.ms/u/s!AlYGbbB6jYztwVBAfPE8acADVRhD?e=afqoHb