What procedure did you followed to configure and tune this vehicle? Is this your first arducopter build? How sure are you that you did not miss a configuration step? How sure are you that you configured it using a correct sequence of steps that do not depend on a previously not executed step?
I did accelerometre, compass, ESC, and Radio calibration, set the parametres according to Benewake TFmini / TFmini Plus lidar — Copter documentation, for the lidar, i also set the setting in flight plan accordingly. After all, i’m pretty sure i did the steps correctly, but if there’s a mistake or unexecuted steps, please tell me about it
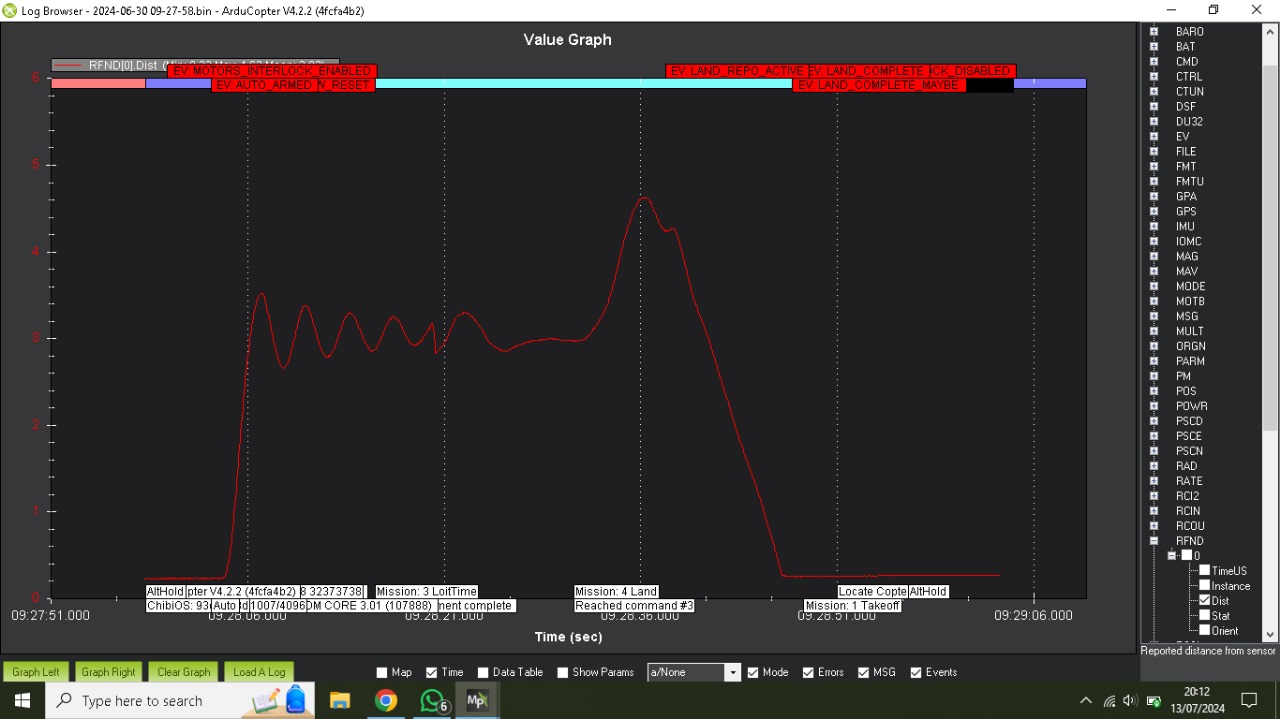
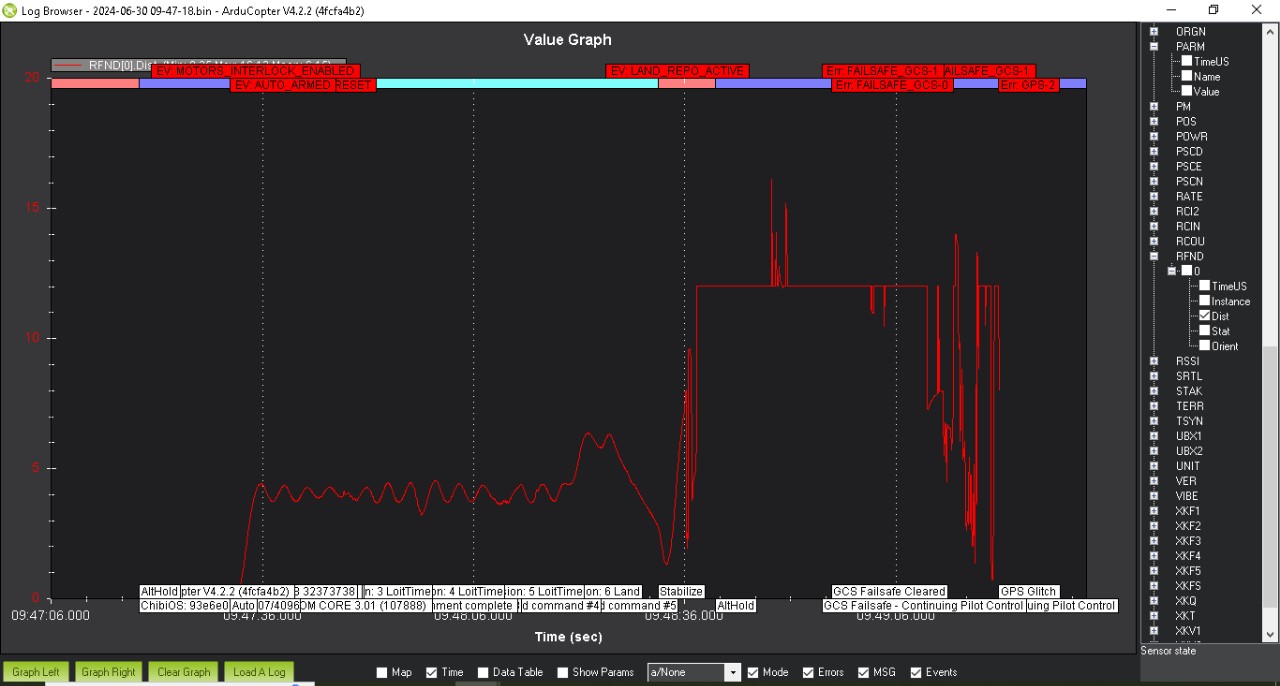
I think the copter is just following the terrian altitude as you configured. Maybe the range finder (TFmini-lidar ) is NOT working properly??? Have you sucessfully configured?
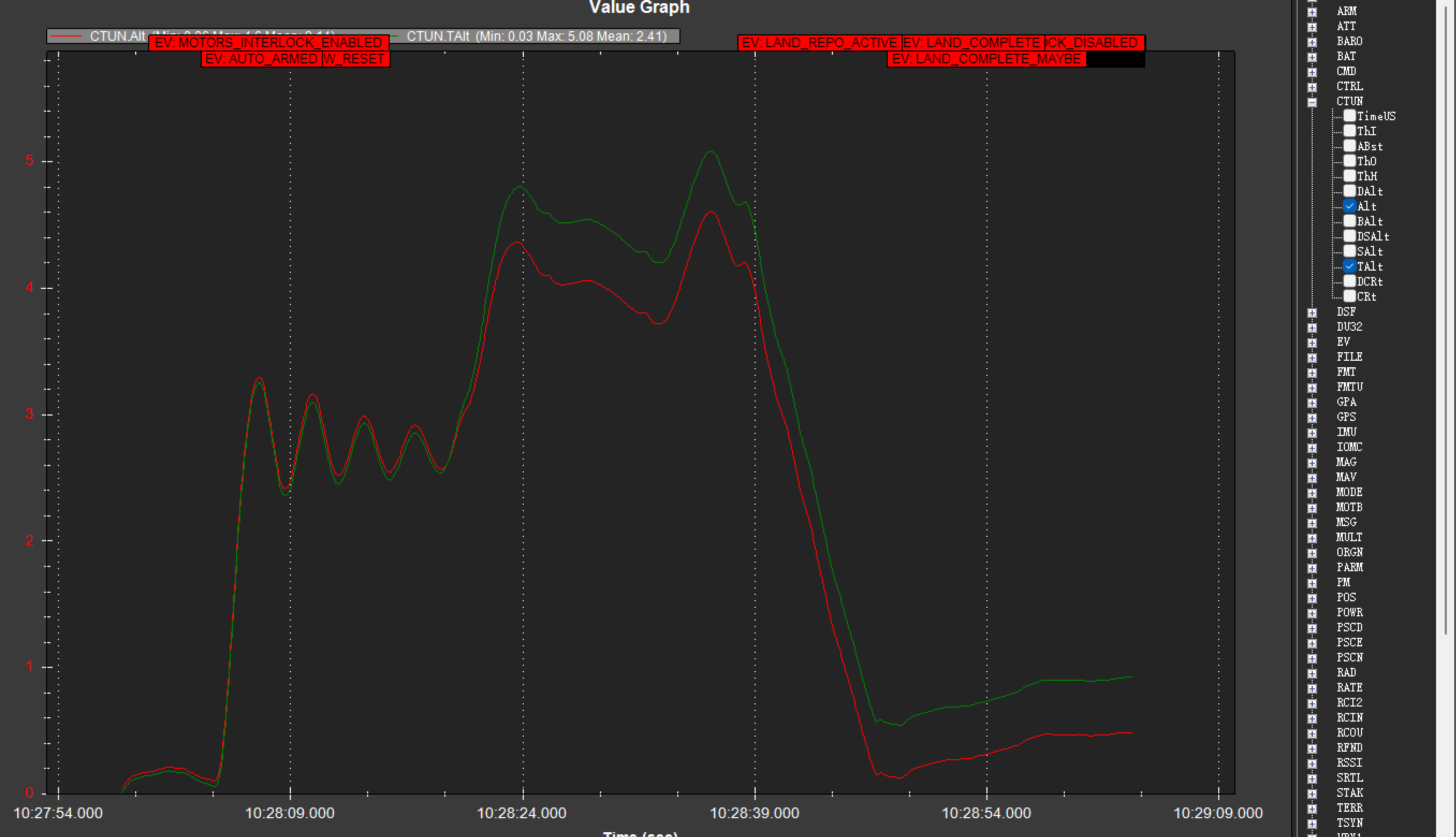
I just remembered that i haven’t done the tuning yet, should i do autotune to make it stable? By stable i mean it does not alternate that much around the setpoint altitude in the mission.
That’s not something you conveniently “just remember.” All of your questions are a bit moot until you follow the proper documentation and configuration steps…
Your other thread shows you are familiar with the wiki and can find the relevant sections. Start at the beginning.