At the moment nothing else is attached.
But I need to add Optical flow device since I am planning for non-gps navigation.
 Are you using the right Firmware? Is the Rangefinder being powered?
Are you using the right Firmware? Is the Rangefinder being powered?
1 Like
my firmware is arducopter 4.0.0, the sensor is powered with a 3s battery 12v directly on the power module.

1 Like
Thankyou for your response!
Whoa! I had this doubt from the beginning. I tried to contact trabee and they are not replying…
I actually came to this discussions by requestin for this firmware " TeraRanger One - not working in AC 3.6 "
Do you have this firmware with you ?
And yes, it is being powered with a 12V suppy.
Hey,
Did you use the Rangefinder directly as it was supplied by terabee, without making any firmware updates to it ?
I don’t have done any firmware update of the sensor… I’ve updated only the firmware of the fc for have more stability…
i don’t want its a lack of the I2C adapter… do you have another fc so you can make some tests?
Hello, good day, did you solve the issue with your sensor?? If you have the cable to connect it on your pc…just test with hterm if the sensor give you some measurements
Hai thanks for your message.
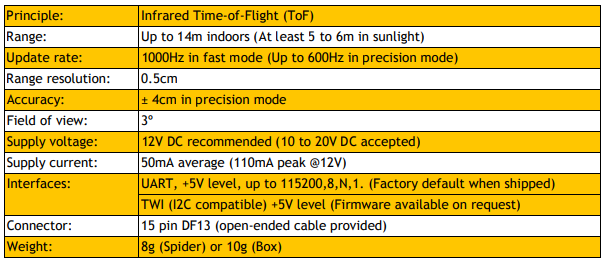
I had checked with Hterm and it was showing readings. Then I checked the datasheet and came to know that the Hterm readings are with data transfer in serial mode. But our pixhawk connection is I2C.
By Hterm test I am sure that the sensor is working but didn’t know about I2C mode functioning.
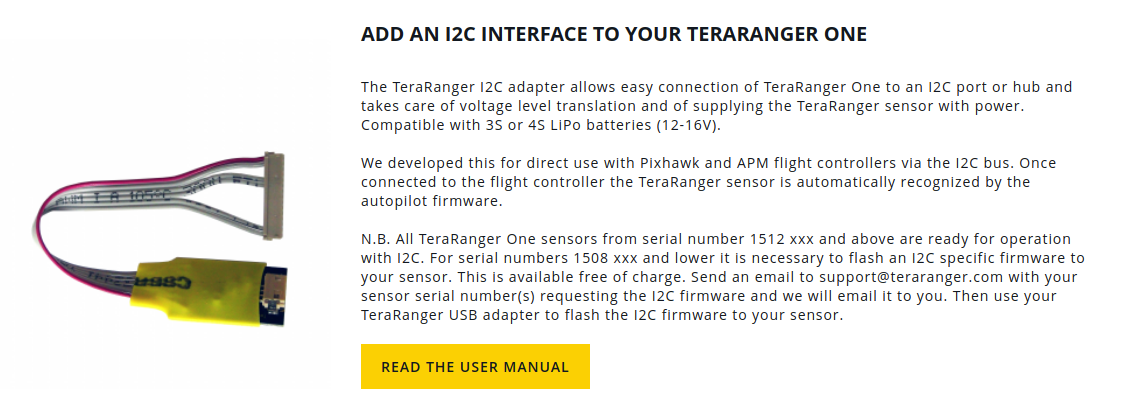
Then I found on this page https://www.terabee.com/shop/accessories/i2c-adapter-for-teraranger-one/ that for TeraRanger with serial numbers 1508 xxx and lower it is necessary to flash an I2C specific firmware to the sensor.
The serial number on my sensor is not clearly readable but it seems 1503 1018. Which is lower than 1508 xxx. so I took an image of sensor serial number and contacted their support team. They said they will contact me with firmware but unfortunately no reply yet!
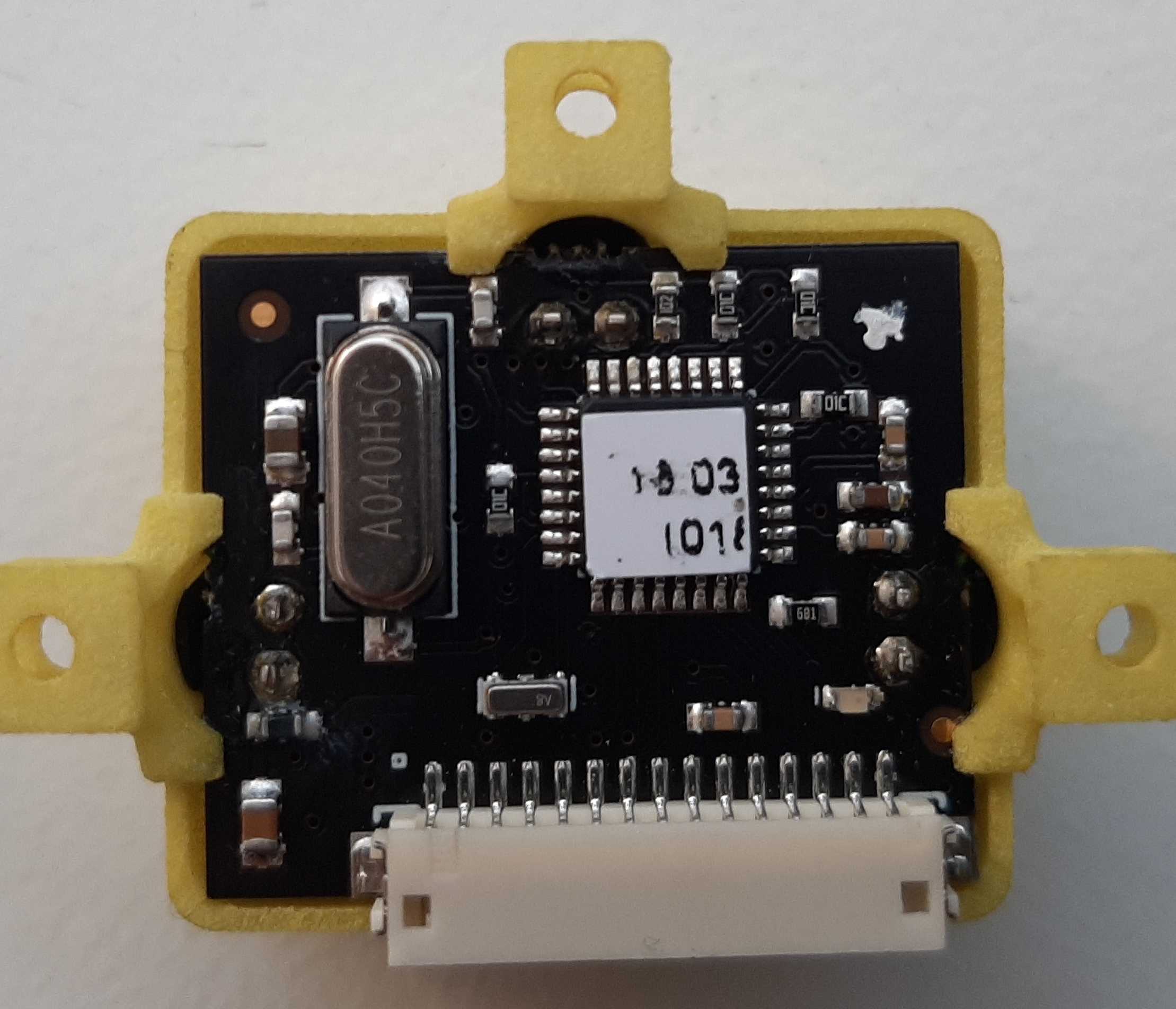
Yes your sensor is 1503… i will check if i can find the firmware online. Try set 127 as add for the sensor
1 Like
Hi,
I am thinking to use the terabee tower evo with ( 8 sensors ).
Here I was going through this wiki :- Object Avoidance with Bendy Ruler — Copter documentation
So here while reading the above wiki, I had some queries.
- Here in this parameter OA_BR_TYPE , If I set this parameter to the value 2 , then it will
searches for path only in four directions: Straight towards the destination, vertically up, vertically
down and backwards.
These are the questions about the above point discussed
(i) So here if the drone is equipped with a 360 degree terabee sensor ( terabee tower evo with 8
sensors) and there are also up and down sensors equipped. Here by up and down sensor, I mean
that the sensor are not only equipped at the front, back, left and right but also in the up and down
of the drone. So if I set the OA _BR_TYPE to the value 2 , then suppose there is a obstacle and
the drone rises above, and in that case suppose there is a obstacle above too, so what will
happen ? Will it avoid the above obstacle or hit the above obstacle even tough it is equipped with
the up and down sensors ? Is there any way to avoid that too or not possible?
(ii) If I set the OA_BR_TYPE to the value 2 , and there is a building in front of the drone path, so how
will it avoid. Will it rise above the building untill it senses that there is no building in front of the
drone or it will fly sideways and slide untill it comes to the end boundary of the building ? I mean
that, will that time, the drone will react as it reacts in OA _BR_TYPE to the value 1 , I mean that
will it avoid horizontally or vertically ? Is OA _BR_TYPE to the value 2 , is a mix of
OA_BR_TYPE to the value 1 and OA _BR_TYPE to the value 2. Which is more good ? Value 1
or Value 2 ?
(iii) Difference between the OA_BR_TYPE 1 and OA_BR_TYPE 2
I already read the docs for which I attached above in this post but not detailed enough to understand it.
- Is terabee evo tower supports the following :-
(i) Bendy ruler ( Yes or No )
(ii) Dijkstra’s ( Yes or No ) As I think that Dijkstra’s support only camera based vision?Am I correct?
(iii) Terrain following ( Yes or no )
(iv) Path planning for drone ( Yes or No ) - What is the difference between Dijkstra’s and smart RTL ? Are they both same or different ? If
they are different, then how ? As I know that Dijkstra’s also shortens the paths and smart RTL
also does the same. So any difference ? - Can you give any wiki link which shows the use of up and down sensors too to be used as
obstacle avoidance ? I mean that including front, back, left, right I need that the top and bottom
sensors too should be used for obstacle avoidance ? What will happen if there is an obstacle
above the drone so therefore I need that the top and bottom sensors also to be implemented along
with all other avoidance sensors but I cannot get any wiki link. - How can I get terrain following using additionally 9th lidar terabee 60m sensor ? Already 8
sensors used in front, back, left and right of the drone obstacle avoidance. - Can I use a tenth obstacle avoidance sensor to get top obstacle avoidance ? I mean, if there will
be a obstacle above the drone, then the terabee 60m can be used to avoid that also ? - Can I mix Dijkstra’s and bendyruler with manual and other modes also ? Here I mean that always I
will not give mission to the drones and give path but I will also fly the drone myself. Sometimes manually or in modes like Loiter, Altitude hold, etc. So my requirement is that suppose if I setup the Dijkstra’s and bendyruler, then that will of course only work in Auto, guided and RTL. But what about manual or mode flying by the pilot ? I need that when I give mission to my drone and select auto mode or in RTL, then the bendy ruler with Dijkstra’s should work and when flying manually in althold, loiter or in no mode (manually) by ourself, then what to do ? What should I setup ? - While flying manually by ourselves in manual, loiter, althold mode, etc I want that the drone should not stop if the object or obstacle is there. It should react to it. I mean if there will be a approaching obstacle, then it should also react. It should not only stop. Even tough the obstacle is not moving, the drone should react. Is there any this type of avoidance available ? Link please?
- Can we also add more than 8 sensors in terabee for pixhawk cube orange ? As the hub supports maximum 8 sensors ? What about ninth sensor ?
- Can the same sensor ( terabee 9th sensor used for obstacle avoidance along with terrain
following) ? Or I need another terabee ? - What is the difference between TeraRanger Evo 60m and Evo 600Hz sensors ? Please explain in
detail. - What is the range of TeraRanger Evo 600Hz ?
- How many Hz is the Teraranger Evo 60m ?
- After getting the Teraranger Evo 60m, then can it be used as 600Hz ? Can it be converted ? I
mean that 60m and 600hz are totally different ? - Can I use more than 8 sensors of terabee as I know that maximum, only 8 sensors can be used ? How can I use 9 or ten sensors?
- How can I get obstacle avoidance with terabee and pixhawk cube orange ? Any wiki page ? I need a obstace avoidance which can react to the object or a moving object.
- How can I get visuals on my drone transmitter like in DJI you get the warning and beeps ? Is it available ? I use herelink system and pixhawk cube orange ? You already know that as I mentioned earlier.
- How can I connect Terabee with my pixhawk cube orange. Please give some diagram or any link for pixhawk cube orange ?
- How to get terrain following ?