Hi,
I have installed EVO 60 on Quad, Pixhawk Cube Orange wit two GPS Here. One GPS is connected to GPS1 and second to CAN2. Both are connected as blend (2). Tera range is connected to serial4.
In mission planner is lidar displayed correctly and setup is according the manual. BUT, when drone is flying in the open space, without obstacles round 200m, the flight is “hopping”. I fly in Loiter mode and drone is suddenly braking and after short time continues fly…and repeating this dance. Without Terarange the drone is flying perfectly. But obstacle avoidance cant be connected.
Du you have somebody some experience with this behavior? Please help me.
Thank you
G
log is included here https://www.uschovna.cz/zasilka/MVLPA3NVA7RTDV9X-TAX/
short flight video is here https://www.uschovna.cz/zasilka/MSGWD5XDW49348YD-UL5
Hi @George. It’s worth noting that this log is from Copter 4.0.7, and the new beta release Copter 4.1 Beta, has had major updates.
Having said that, I don’t think your problem is going to be solved by upgrading the firmware. Upon inspecting your logs:
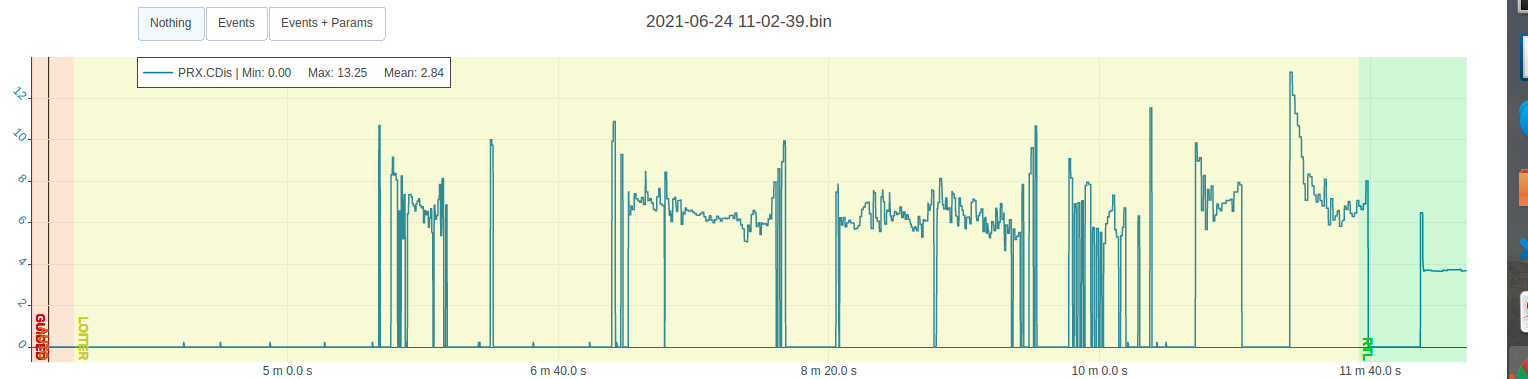
The sensor is constantly picking up distances around 5-7 meters away from the drone. Your avoidance margin is set to 7 meters, so that is why every time the sensor reports that value, the copter jerks to a stop…
I can’t tell you for sure why your sensor would report that value, perhaps someone on the forum who has this sensor can test it
Hello, thank you for your help. The problem is that I have Cube Orange and I cant update firmware, because Mission planner reports error “cant connect to the board…”. Anyway thank you and I will try to update FW.
Regards
G