What is PPM passthrough of a telemetry?
I’m about to get a set of telemetry system and devs are all suggesting RFD900 series. So I want to pick to latest version, RFD900X, and it features PPM passthrough.
Is it the same as RC PPM?
1 Like
Yes, that’s exactly what it is. The rfd900x can do rc ppm and telemetry at the same time, if you connect the ground radio to your rc transmitter ppm output (ie trainer port or module pins) and choose the right settings.
Is the setup same with this? http://ardupilot.org/copter/docs/flying-with-a-joystickgamepad-instead-of-rc-controller.html
Or this RFD900X has searate PPM pin?
I want to get rid of 2.4GHz system because its range (100mW) is only fraction of RFD900x as well as reduce interference, Telemetry + 2.4G RC + Video packed together can’t be good right?
900x has ppm input pin

Arrived today
Any possible problem from heatshrink?
Also I cant find datasheet for this X variance.
Which is the PPM IN which in PPM OUT pin?
This is what I found
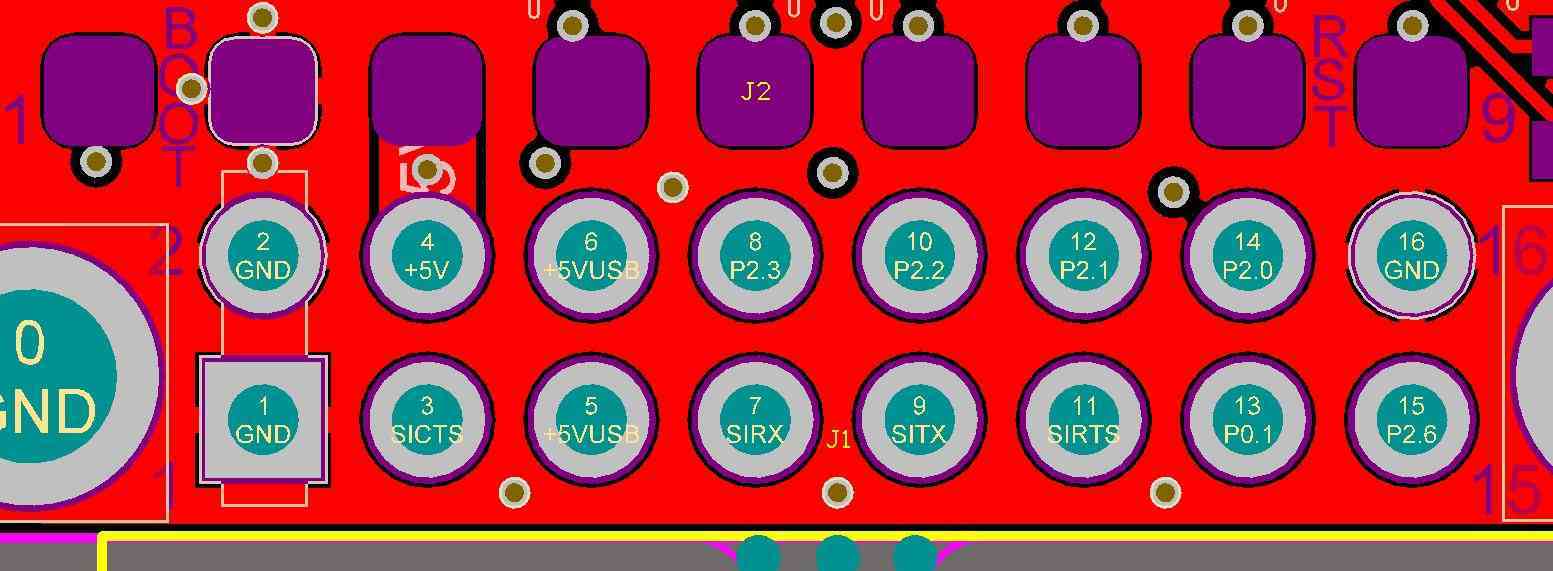
The PPM pin is pin15. Depending on your setup you may need a logic level shifter / diode and resistor, as it’s a 3.3v logic pin, and isn’t 5v or 6v tolerant - ie don’t connect a reciever directly to this pin unless you drop the voltage or are SURE it is 3.3v logic!
It’s pin15 for both air and ground radio (PPM in and out use the same pin, just a different param when you do set up)
Have you try to config the 900x with PPM ?
Can you share the cable diagram please ?
Thank you
I haven’t figured out the voltage my transmitter outputs from its trainer port (DEVO 12S)
Haven’t got a chance to use an oscilloscope yet.
Any one have make it done with full setup ?
I’m going to have to get a set of these radios and also see if I can add a MavLink-> Jeti Exbus telemetry adapter to my ground station.
Does anyone know if this only works on the 900x radios? I really wish they made 900x(ish) version of the 900u.
I play with UAV, so the farther the better. It is more safe i think when i stay connected at least 10 Kms Radius.
PPM only works on the 900X that also has a 32bit MCU in a more recent RF IC.
Ideally for best range the RFD900x would go on a mast with your RC RX with PPM connected to the RFD900x PPM input. That way the antennas are stationary and can be positioned towards the aircraft. Instead of using the customary FDTI/USB cable, one can mount it on a mast using it’s own power supply battery, and one can use a Pi Zero W as a wifi AP for getting telemetry to the GCS wirelessly. Make sure the RX PPM output is at the right 3.3V logic level, and that you have 5V on the RFD900 power rail from the battery, before powering it up!
I wouldn’t use a Pi ZeroW. Testing has shown that the crummy pcb antenna on the ‘W’ drops packets all over the place. IIRC it was something like 50% dropped.
Or you can add a uFl connector to the pads and put a proper antenna on 
It depends on how low budget or compact you want to get the base comms relay! My point was to make it portable and wireless, and so that you could just keep on buying RFD900x’s without having to buy another RX for each plane just for PPM. A pi3 isn’t much better, if at all. But what SBC to use is a different subject I suppose.
I could be wrong, but I was thinking yesterday that something like a pi would be overkill. Aren’t there commercially available serial to wifi adapters?
I guess you were suggesting that the pi zero could handle the mavlink to jeti conversion and the wireless relay to a laptop/tablet.
I do need to look into how Jeti handles having multiple “models” in the radio linked to a single receiver. I think I’ve done this in the past without any issues but I honestly can’t remember at the moment.
For RTK GPS operations, I actually think this wifi/RC/RTK gps base station could be an awesome setup but I need to look into the wiring and such for RTK a bit more.
Hey Andrew
It depends on what you need/want.
You’re right that you could use a ESP8266 or even better a ESP32 as a serial to wifi bridge, however if you add a raw capable M8T or a modded M8N GPS and RTKLIB on the pi you should be able to get RTK working as well. One of the main reasons we use the pi is to run mavproxy, which gives us the ability to reroute telemetry over RFD900x, wifi and 3G/4G mobile (USB dongle) and even back to a Taranis screen, however we want. Also imaging etc can be recieved via the 4G modem and multiple GCSs can be used, like tablet or PC. Another thing you can then do is to run a I2C oled to monitor link status directly and integrate a few buttons as a failsafe, for example one for RTL, land, and play/pause etc. Or run Ardutracker for a directional antenna. It opens up a fair few options that need to be only installed on linux on a pi, but would need to be ported to ESP32 etc.
Thinking a NanoPi Neo Air or Neo2 ought to do nicely as it has a faster CPU and a few other upgrades over a regular PiZero.
I need to study this MavProxy…
RTKLIB sounds interesting but I think I’m probably going to start putting Here+ on our aircraft and I honestly don’t know if it is even possible to make all this work with a Here+ base unit.
Andrew
You can use Reach, Here+ or get some M8P’s from Drotek instead of RTKLIB.
If space and battery consumption is not a concern on the ground I’d get a Odroid C2 or XU4 as they are typically better supported than some of the banana/orange/Friendly-Arm ones, and have better performance (XU4 has USB3 etc). (Armbian comp. helps)