New member here - I just rebuilt a 3DR IRIS+ with a new PX4 and Copter 4.1.5, using
MP Ver. 1.3.77. Following GPS acquire, the telemetry reported on the Iris+ remote is
providing altitude as ASL instead of AGL. Speed also reporting incorrectly, grossly bogus. However, voltage, current and satellite count are correct.
I should add that a 450 quad I built as a test platform exhibits exactly the same issues,
all else being equal.
However, the speed and altitude are correctly displayed by MP when using as a ground station…I recall seeing some 2018 posts regarding a similar issue with OSD…
MOT_SPIN_ARM,0.07 and MOT_SPIN_MIN,0.03 are in conflict. At least swap those values around.
Even better is to use MissionPlanner motor test to find the minimum reliable startup percentage and set that as MOT_SPIN_ARM, add some like +0.03 and set that as MOT_SPIN_MIN (for example 0.07+0.03=0.1)
Y axis vibrations are bad, so something is touch the flight controller or wires are pulled tight. Sometimes it’s because vibration damping is not equal in X and Y axis and should be adjusted.
Check Prop balance too.
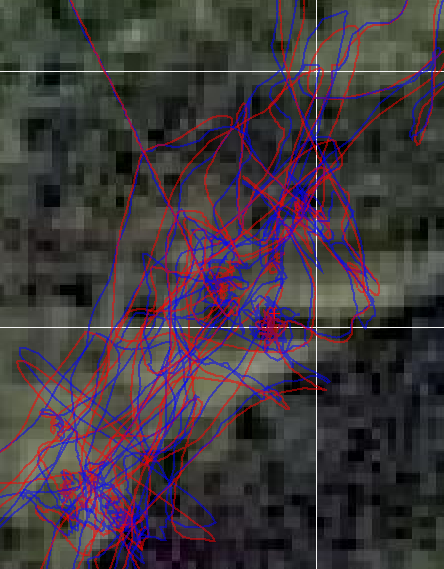
GPS HDOP is also poor. Combined with vibrations this makes the position accuracy bad and you can see on the map you GPS position and calculated/IMU position is not the same.
Wait for a good GPS 3D fix before takeoff, this can take a long time for small craft that are sitting on the ground. Select Loiter Mode and wait…
Or set the Fence params and that will also force you to wait for a good GPS 3D fix even if you forget to select Loiter mode.
Thanks Shawn - appreciate the check! The plan is to do a full tune after resolving the initial obvious problems. It was a poor HDOP day when the log was taken and my test area has a poor GPS horizon. I did catch the motor spin-up parameters yesterday,
post that flight.
Hi Shawn - wondering if you could take a quick look at the attached .bin from a very short flight this a.m. (low battery).
The telemetry is still incorrectly reporting altitude as ASL and the speed shows the same value as altitude.
What happens is: Initially when armed all telemetry is correct. However, at some point
before takeoff the altitude and speed ‘snap’ to the incorrect values and remain locked
there.
The developer param has been set to ‘2’. I haven’t addressed the high y vibes yet as I’m trying to do things in sequence …