Hi all,
I’m running a Rover with APM 1.3.62:
Pixhawk 2.1 The Cube
45A ESC and 500W motor.
FrSky Taranis and X8R receiver.
I’m also using the mRo 433MHz telemetry link.
I’m primarily wanting to record the x,y,z accelerations, roll, yaw and pitch, current drawn by ESC and servo, and also R/C inputs.
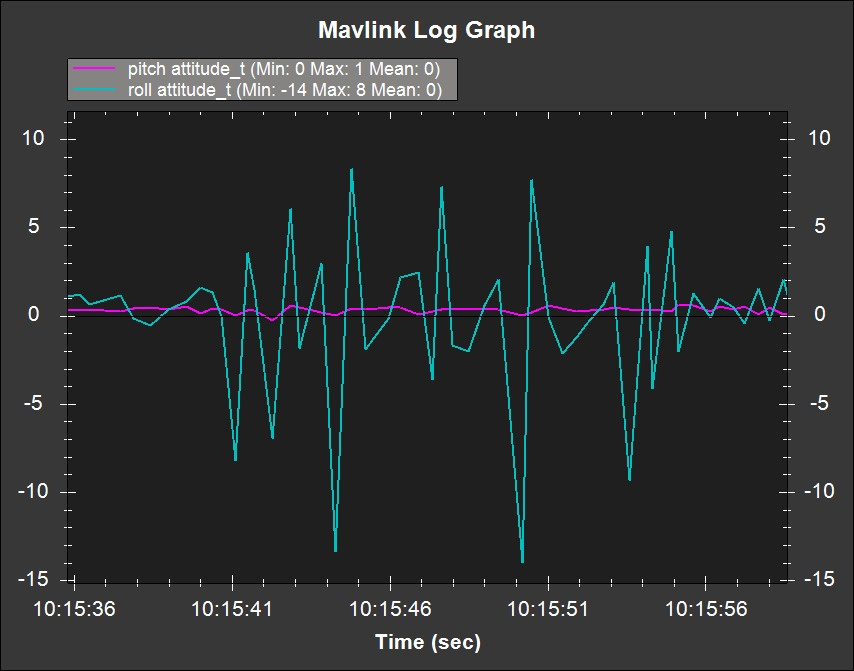
I’m able via the telemetry logs to get some of this data but it all looks to be recorded at 2Hz.
I see in APM -> Configuration -> Planner
that you have a variety of ‘telemetry rates’ which have drop down menus.
I’ve assumed that these are Hz (?) and selected 50 for the attitude, position, but the telemetry logs after this change are still only at 2Hz…
Some questions:
- Any ideas how I can bump up this sample rate?
- Any ideas how I can single out those parameters (x,y,z accelerations, roll, yaw and pitch) without including everything else (to save the CPU)?
- I see that the pitch roll is presumably in degrees, and that my z acceleration is usually around -980 to -1000, which leads me to think this is vertical…but what are the units? Do I need to calibrate these raw data readings?