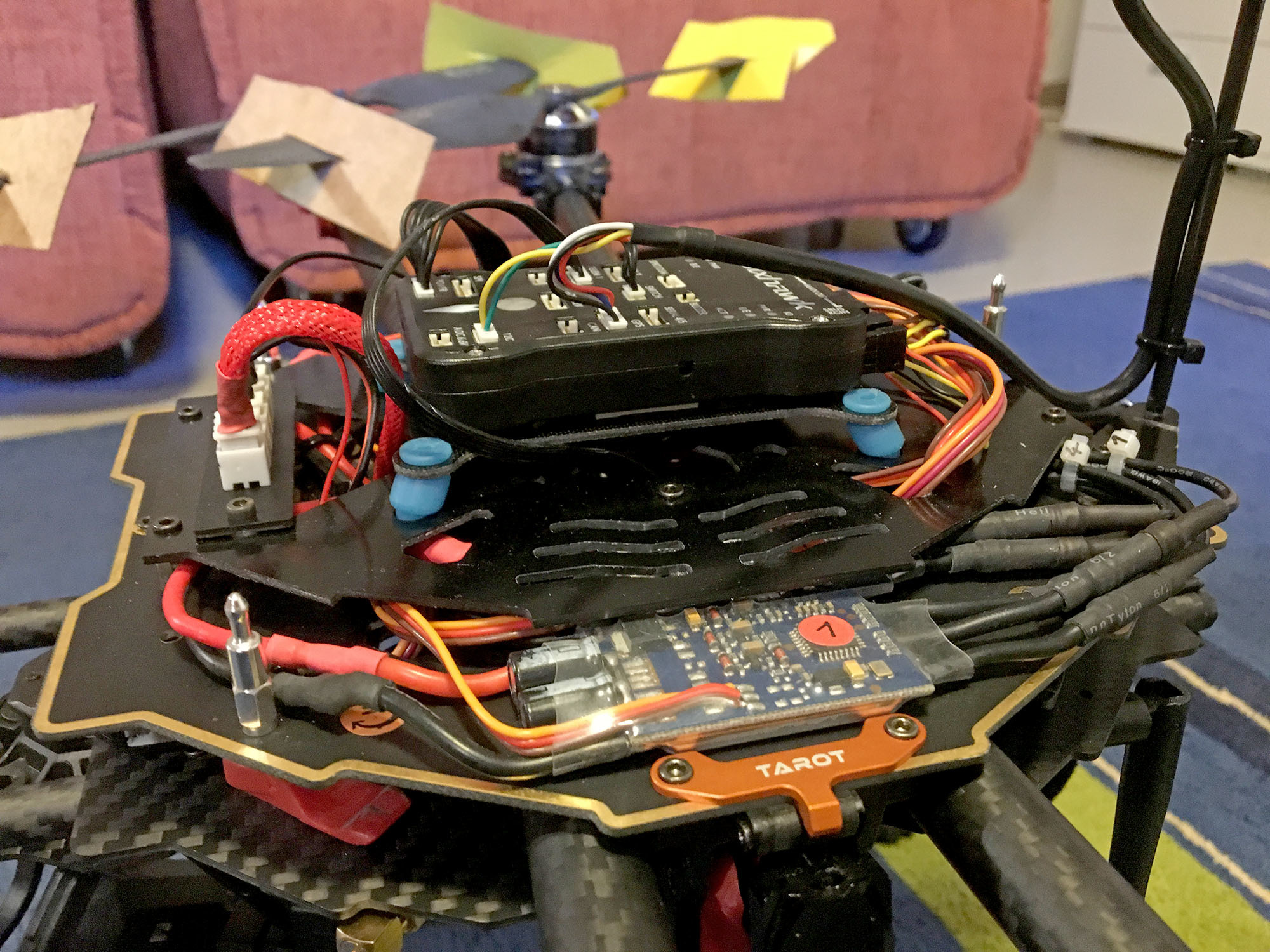
Let`s first start with some hardware:
- Tarot 650 Sport – modifications: Tarot 680 PRO arms (TL68P05 - 262 mm and anti-vibration motor-mounts (Tarot TL68B33/TL68B34)
- Tiger MN3110 – 470kv /w Bulltec (equals HK Blueseries/ZTW Spider) 30A Opto /w SimonK
- Gemfan / Tiger CF Props 15 x 5.5
- 5S 5000 mAh
- Tarot T4-3D Gimbal + GoPro 3
- total flying weight ~2,4 kg
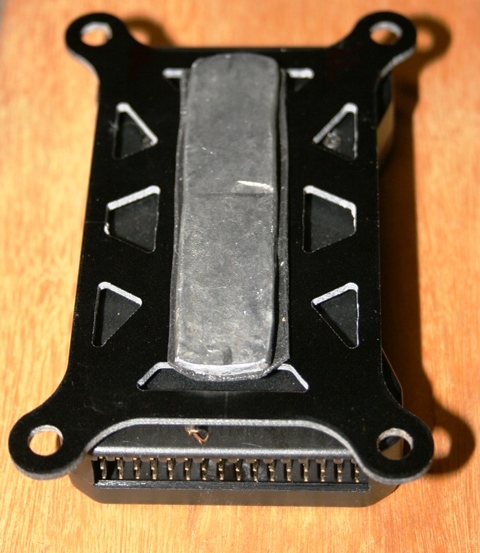
- Pixhawk 2.4.6 /w Arducopter 3.4.3 on anti-vibration mount, ublox Neo-M8N GPS mounted on a pole


Since the maiden flight we are fighting against strong jello in videos and hence a lot of iterations were already done:
- Static and dynamic prop balancing (> positive)
- Change to T-Motor props (> positive)
- Change to cheap 14“ props to change rpm (> no visible change, changed back)
- Propeller tip adjustment (both tips running the same path) (> no visible change)
- Autotune (> no visible change, settings too aggressive, changed back – shown log is with default 3.4.3 PIDs)
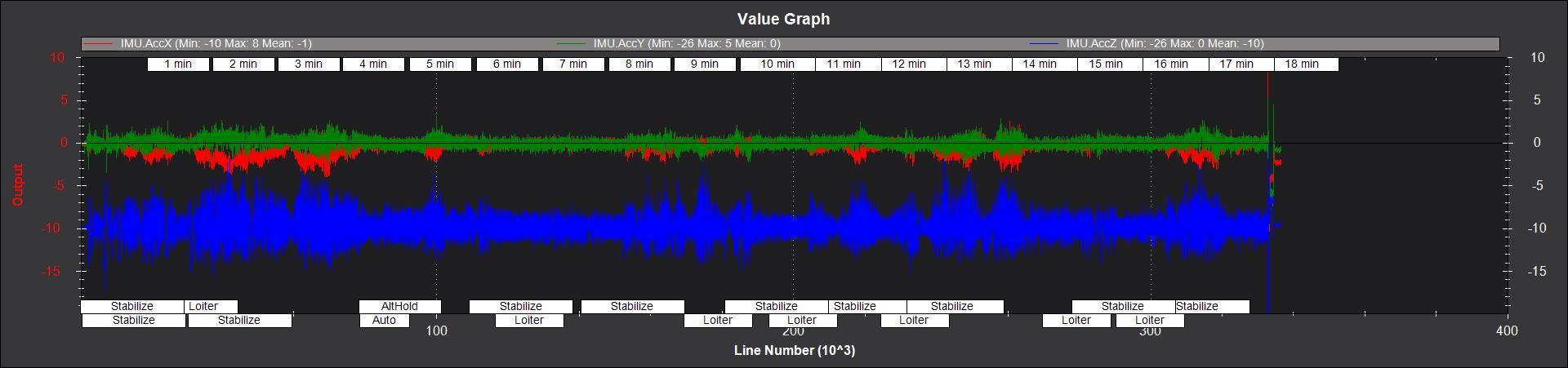
The vibrations (according to pixhawk log) as well as jello (as seen in video) were noticeably reduced over time, but are still in an absolutely bad zone. Therefore we did some log analysis which show very good vibeX/Y and a very poor behaviour on the vibeZ. In steady loiter the vibeZ are „okay“ (15 … 45 – mean 30). As soon as the copter starts moving the vibrations are increasing to alarming rates. Even a lot of clipping (but only on 0 and 1 – 2 equals 0?) is happening here.
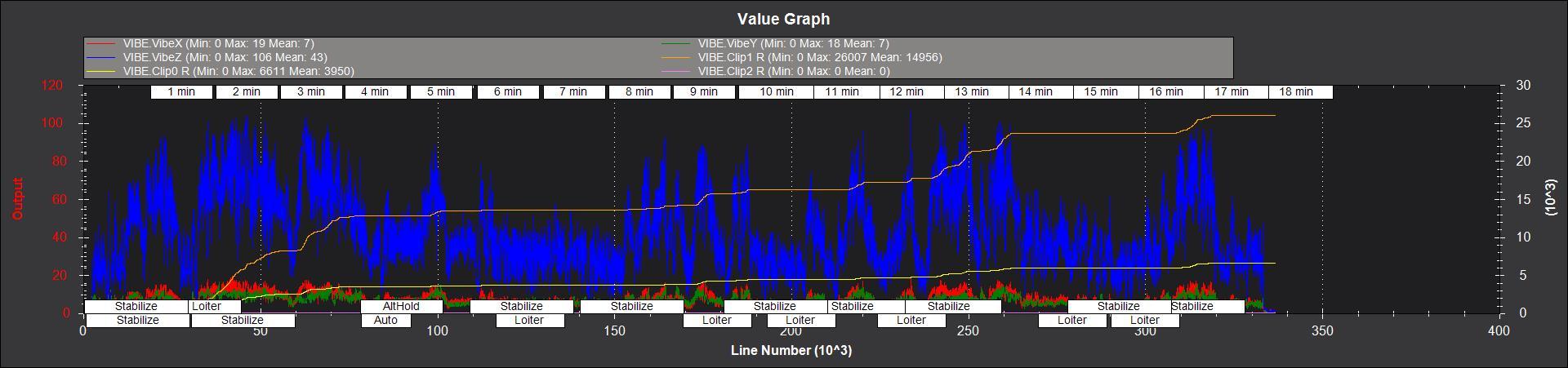
Auto analysis is GOOD (except of the IMU mismatch and of the motor balance – gimbal and gear are also driven by RCOUT and therefore affecting the average here)
We are still at the beginning here and we have absolutely no ideas how we can improve any further – buying a RTF DJI Mavic maybe…? Well: Any help to fight those z-vibrations are highly appreciated!
PS:
Just for documentation – this setup has NO sync issues using low KV motors and SimonK and works very well in autotune.
The landing in the log was hard and expensive – one rod of the gear failed