You might wanna lose the anti-vibration motor mounts. There’s some test videos on YouTube which suggest that those actually increase vibrations to the frame.
I have CUAV Pixhack, which keep his own vibration dumping inside, so i simply put it on gel of it’s size. But you can cut any form and size of gel (i’ve doing so for GPS mount) and use it with pixhawk.
Interesting, I did do a small amount of back to back testing and found the antivib mounts better but I was primarily looking at XY vibes at that time. I’ve always struggled with z vibes so maybe it’s worth doing another test. I changed to the aluminium mounts primarily however because the plastic mounts kept breaking and I had a near crash because one rotated 45deg mid flight.
I stuck with the plastic mounts. Before fixing to the carbon tube I wrap the tube in a single layer of scotch tape making sure to not overlap at the ends) and find a much better grip without needing to overnighten. None of my original plastic mounts have ever cracked when tightening. I have seen that video also. Interesting findings which put me off buying the aluminum mounts.
If the pixhack has internal dampening, then why do you need to add anti-vibration gel at all? Same question would apply with pixhawk 2.
Here is the pictures as promised:

3d mount - Wires are a mess, but they aren’t transferring vibrations
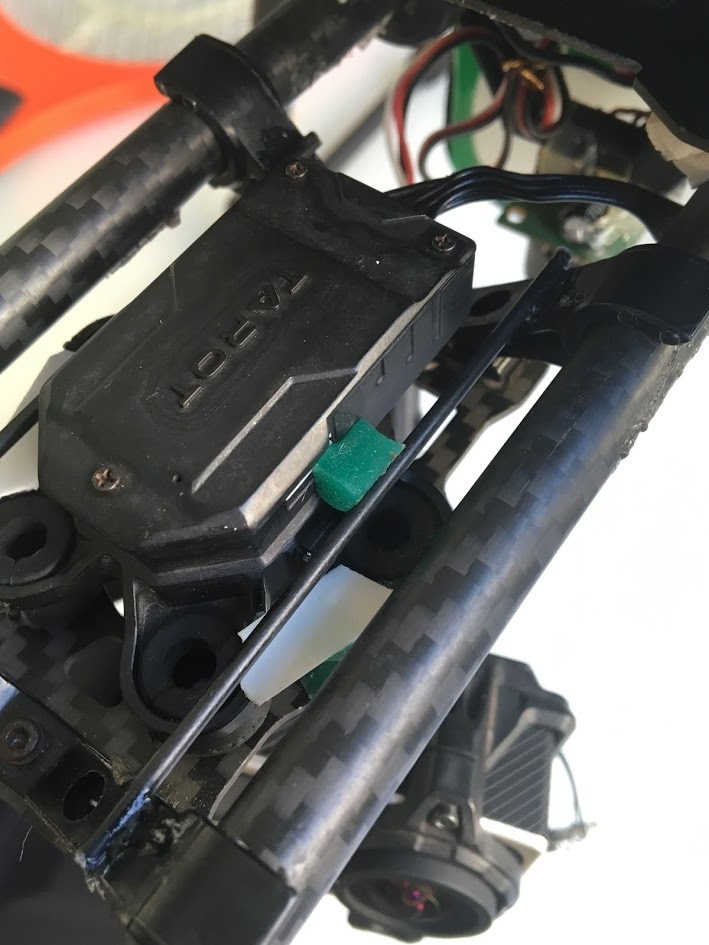
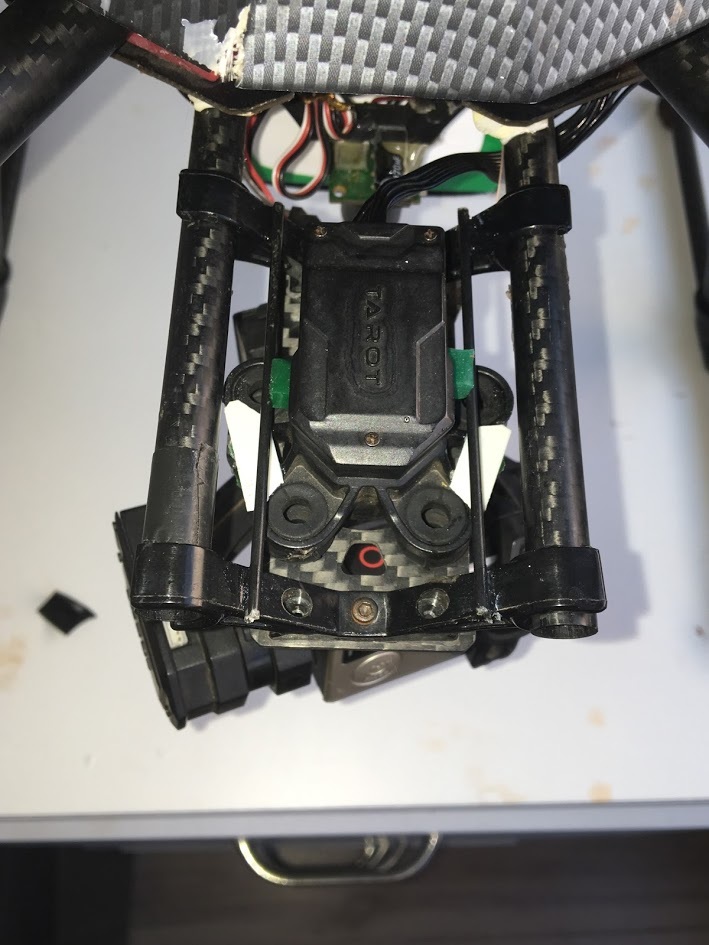
Gimbal with compressed kyoso gel

Camera and battery ofsetted to get proper cog
C
Good tip, I’ll try that.
Sorry for the late reply – but I think all of you know the situation “work >> hobby…”. Beside the everyday business we took some improvements suggested by you guys!
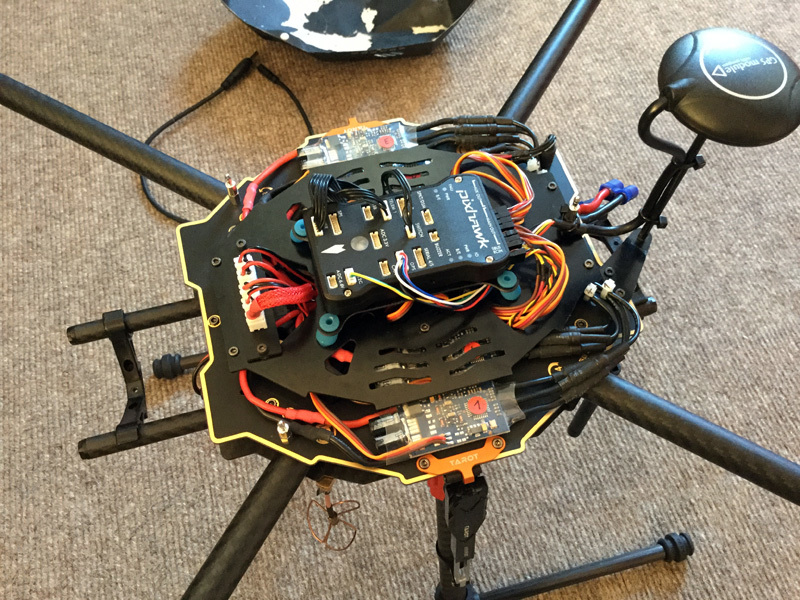
- Adding weight on the bottom of the pixhawk-mount - total mass of ph+support was raised from 46 to 76 grammes (thx @ Gerhard!).

- Even more promising were some scratch marks in the inner side of the canopy. This was a safe indication of major vibration transfer by the wires (especially the stiff gps-cable had contact to the hood). Took some modifications and reinstalled the entire wiring (thx @ Lance, Fernando!).
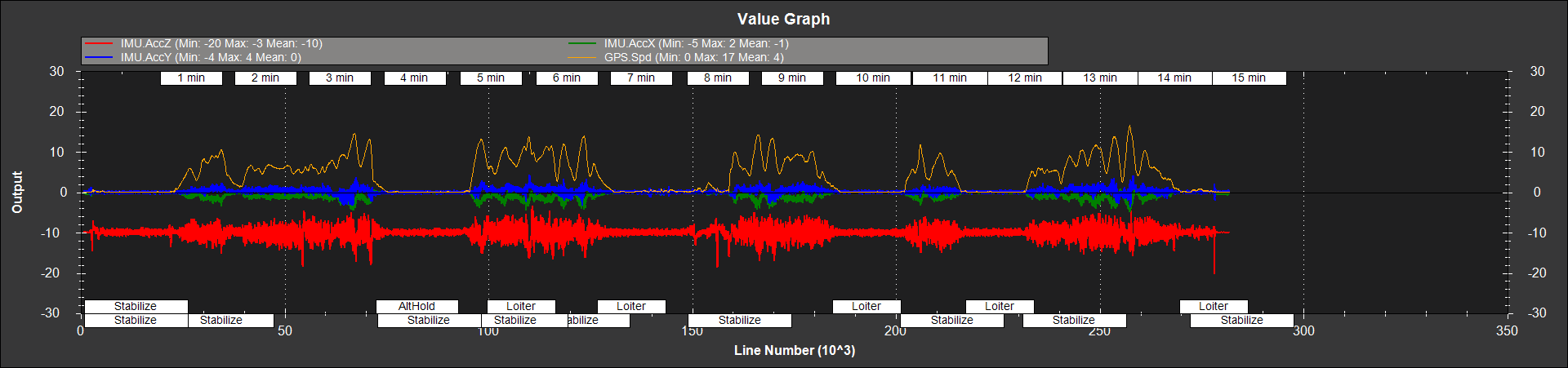
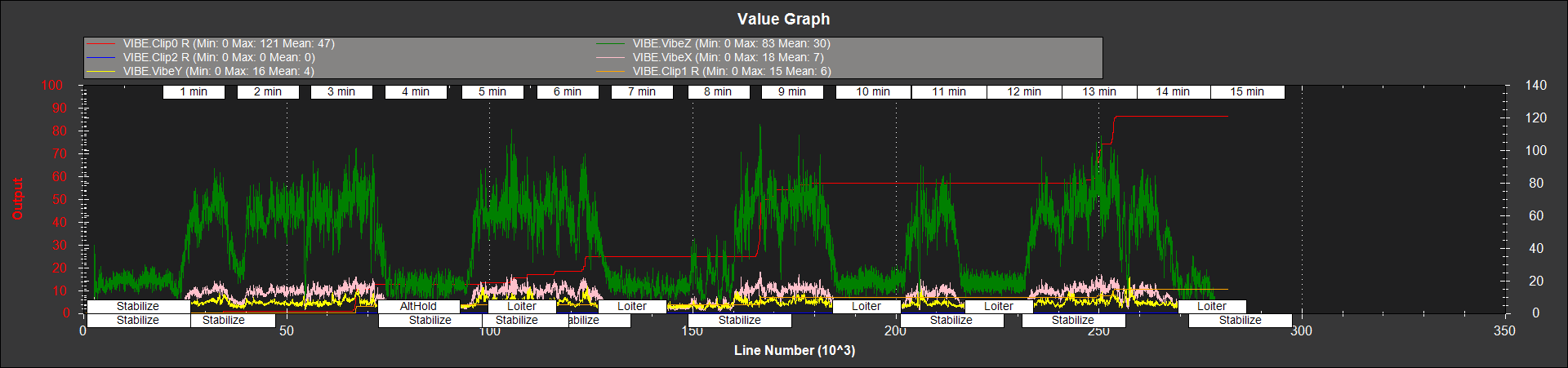
Finally we got everything back in place and took our first flight at the last weekend, without the gimbal attached yet. The outcome was another step in the right direction – the vibration levels at the pix were significantly reduced. Loiter stages are awesome… faster copter-movements are sort of okay. X- and Y- stay very nice all over the time, Z-accs are still even higher (still confused about the reason) – Clipping was reduced from >25.000 to about 120 – so full points here!
We also took some CNC-action with the T4-3D gimbal and added dimensional support for a YI 4K (Full-HD @ 120fps should help, too) – stay tuned for more. Fernando: Your input around the gel-support for the gimbal is also very helpful and on the todo-list.