Hi,
We have been flying a Tarot 650, recently out drone fell out of the sky (assumed) due to a bad LiPo battery which cut-off mid-flight (cut-off at much higher V than expected).
I have now restored the hardware and am trying to do all kinds of sensor sanity tests.
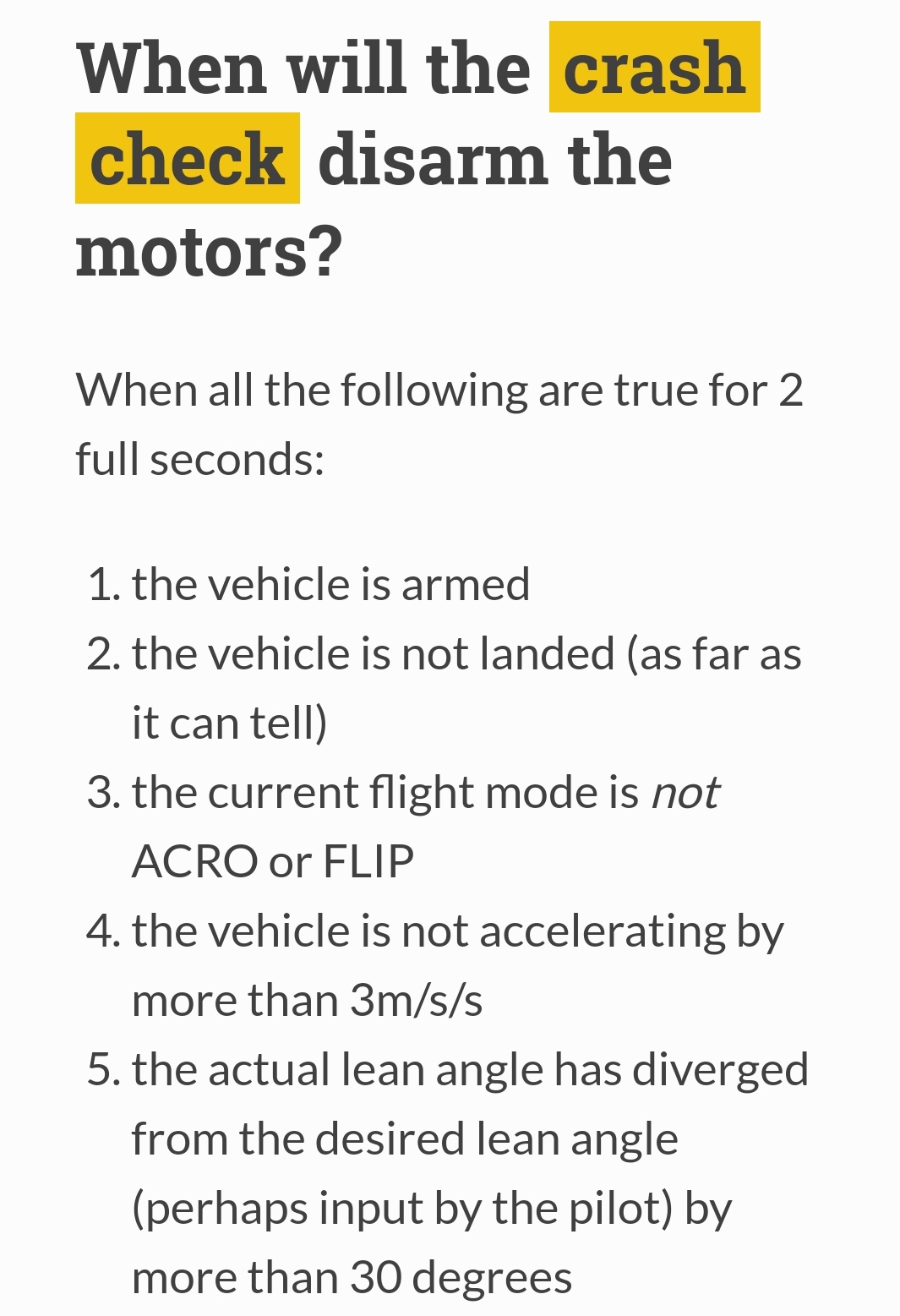
One of the tests, I put the drone in an open field without propellers and run the motors. After some time, the drone throws the ‘Crash Detected’ error and disarms itself. Likely when I try to maneuver the Yaw joystick.
To debug, I have re-calibrated the Accelerometer and Compass, but having the same issue.
Looking at the logs it seems like changes in ATT- Roll, Pitch, Yaw are causing the error. Remember the drone still on the ground with me controlling the non-propeller motors.
I can confirm the arms and body of the drone a structurally stable.
Any help on how to debug will be appreciated?
Will it be safe to put the props on and fly a few meters above ground for further testing?
Here is a log file: https://drive.google.com/file/d/1Di4f5vaAVu6C4x-SrOtgpHdwBxtrAnbQ/view?usp=sharing
Thanks