Hopefully I’m not misunderstanding your question too much…
Taranis can do more than 8 channels, depends what receiver it binds to.
You dont need the same number of RC receiver channels as MAIN and AUX outs.
You only need pitch, roll, yaw, throttle and flight mode - 5 channels at minimum. More is better of course.
Like Channel 6 for tuning, channel 7, 8 etc for any other things like maybe gimbal control.
You dont control the motors directly with RC Channels - the flight controller works out what to do with the motors from your inputs plus gyros, accelerometers and GPS.
So if you’ve got a Octocopter you’ll be using all 8 MAIN outs for motors, all with just the basic 5 channels. If you’ve got a quadcopter, you only need 4 MAIN outs.
You can still go ahead and set up other RC channels for things, but sometimes you could have the flight controller using AUX outs for controlling certain items without consuming an RC channel at all.
If you’re a novice, I suggest setting RC Channel 7 to RC7_OPTION,31 (Motor Emergency Stop), and later once everything is working well you can change it to Auto for doing missions or something else useful.
Thanks but you went on a different tangent here. I am familiar with what you have described above.
My question was is there such a thing called a 16 channel RX either for Futaba or Taranis without using two receivers to get 16 channels. I am doing some custom development and I want to use all 8 Main outs and all Aux 6 outs.
OK - thanks for clarifying.
Yes, for Taranis a common Frsky receiver is the X8R - it does 16 channels. You can specify which block of 8 channels are exposed to the servo/PWM connectors too.
There’s other smaller ones too - keep in mind that most have limited individual servo outputs, like only 4 or 6 or 8 servo connectors - but will do 16 channels over SBUS output.
A lot also do telemetry too.
A good example is: RX4R will save a lot of space and weight, it only has 4 PWM outputs but supports the full 16 channels on SBUS, full 2km+ range.
There’s plenty more…
so are you saying that if I bind X8R to radio and use SBUS, I can map all 16 channels to PixHawk? are you sure about it?
My understanding is it doesnt matter you use S-BUS or PWM pins, you are still restricted to 8 channels. Yes you can either set for Chan 1 to 8, “or” Chan 9 to 16 but the total remains 8.
This means you must cascade two receivers to get all 16 channels.
You can definitely get all 16 channels over the SBUS port connected to the RCin port on the Pixhawk. The Pixhawk will be able to see and use them, unless something else is wrong.
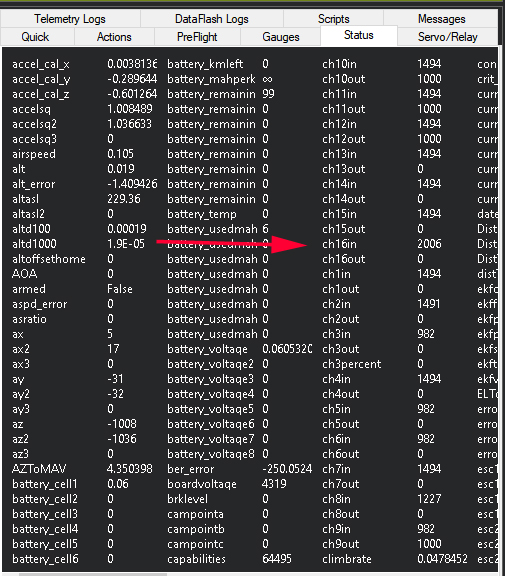
Test it? 16 channels are available on Sbus on all X-series receivers and others and a Pixhawk and any other Ardupilot compatible Flight Controller is 16 channels capable. Configure a Switch on Chan 16 and activate it while looking at the status screen for Chan 16 in. It will work.
Lookee here, flip a switch and Chan 16 goes to 2006 µs