Hi there, i am building copter:
Cuav v5+
bobywing x rotor 8120 100kv motors
32inch props
u80 v1 esc
x frame.
and when i try to take off, lifts only one side, can anyone check logs? whats wrong with it, props and motors mounted and spins to right direction, esc calibrated, seems all good.
log_58_UnknownDate.bin (704.0 KB)
any thoughts? thanks in advance!
here is the log after crash today Unique Download Link | WeTransfer
1 Like
What does this craft weigh and what pitch props? What battery power? The battery monitor can’t be right. Or are you really trying to fly this on 6S battery power?
In any case all Motor outputs are at max on your take-off attempt.
It looks like you made some rather random Parameter changes that don’t make sense. How did you arrive at those if this won’t lift off?
Which parameters are wrong, i played alot with pids, because there was thrust loss errors, and tried to eliminate them with pids…
6S now, before it was 12s, but i thought maybe there isint much power for pix, and i rebuild for 6S because only 6Subec i have, so that dodnt help me…
which parameters are wrong, what can i change? Thank you for reply
Parameters changes will not fix this thrust loss error. And for a large craft you went the wrong way with the PID’s anyway. So, they are all wrong.
No idea what you mean by this but this craft will not fly on 6S power. What is it’s take-off weight?
Start over on 12S power, reset all to default and with your level of knowledge it would be best to use the Methodic Configurator
There was 12S, and was the same problem. Before this drone was flying with 6S…
Takeoff weight is 12kg
I don’t see how at 12kg. This is what you have now on your 6S power at full throttle, as expected:
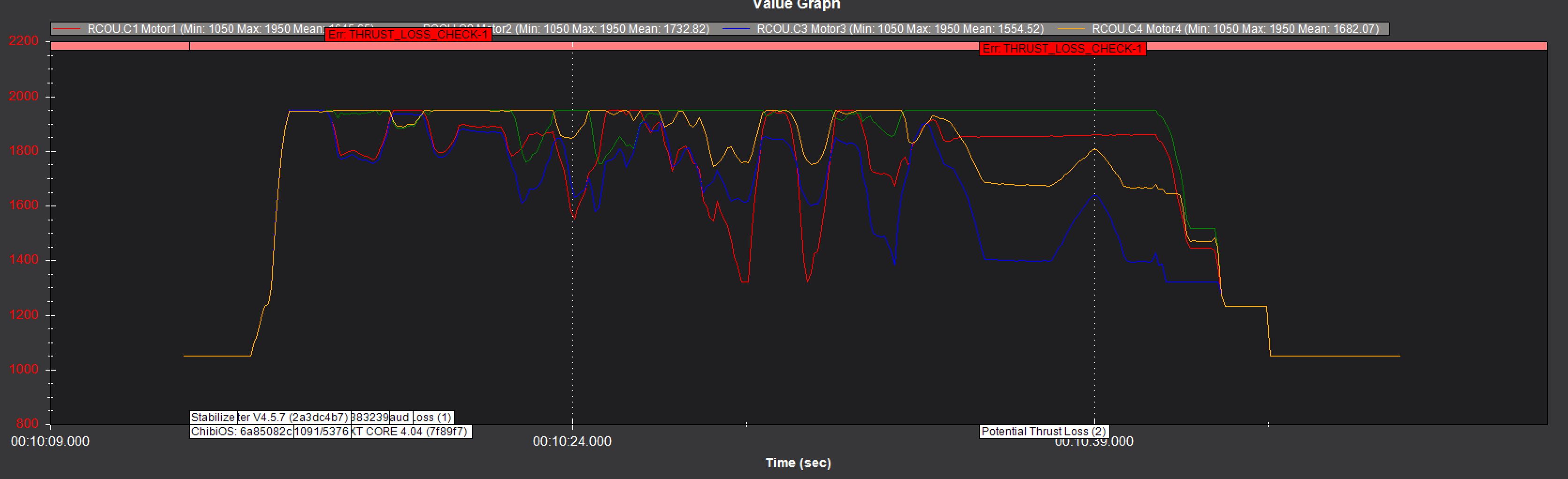
Maxed out outputs and it’s going nowhere.
You need battery current logging.
1 Like
So tomorow i will change 6s to 12s, but friday was 12s but drone lift one side at takeoff as well…
my steps tomorow morning, do it again to 12S and use that website and apps to retune pix.
But did these steps will help me to takeoff?
Yes, using the website and the ArduPilot methodic configurator will help you takeoff.
2 Likes
You may verify your power train with eCalc first. Just check you mass,battery, motors and propellers. Verify if it has enough power to take-off.
1 Like
And how is it better to configure the Pixhawk: after mounting it on the drone or just attaching it to a flat plate and then performing the entire configuration?
Mount it on the drone after performing the IMU temperature calibration
Done everything and the same problem lifts one side
Post a .zip file with the contents of the vehicle configuration directory created by the ArduPilot methodic configurator software so that we can identify the issue.
1 Like
I’m unable to perform the IMU temperature calibration. I can’t get the log because after writing all the parameters, it says ‘logging failed.’ I checked yesterday’s logs where it was with 6s, and there everything seems fine with the IMU temperature calibration. Is it really important? I’ve done 12a and I’m changing the ESCs because I think the problem is with them, not the configuration, since my configuration is simple and everything was set up during the initial setup
No, it is optional. You can skip it.
All users think that their configuration is correct. Untill they find out it is not.
Post the .zip file and we wull tell you if it is correct.
1 Like
here is the last log dont, know looks like done everything right, but lifts only one side Unique Download Link | WeTransfer
hi threre, so i rebuild my drone using holybro px4. and did test flight all was good next day, it was today i was try to flight and got thrust loss errros, can you please check my log? thanks in advance
2025-04-08 21-01-42.zip (447.0 KB)
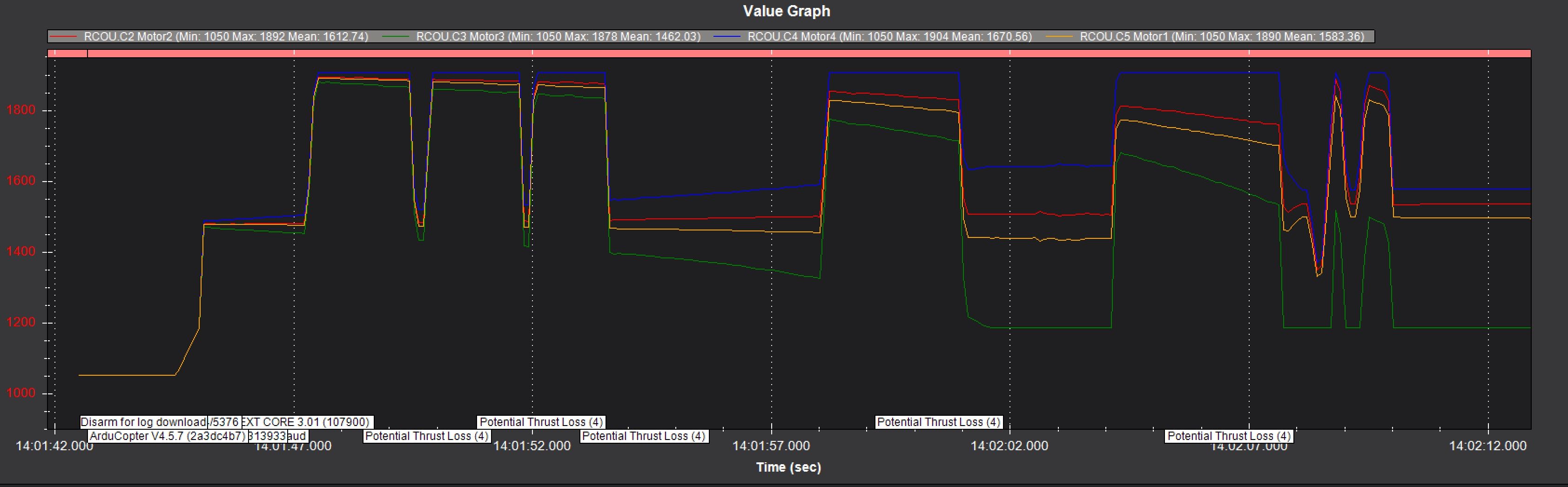
It would be more useful to post the log of the test flight where you say all was good. Because this just shows max outputs and as before it’s going nowhere.
The .bin file is good, but that is not what I asked for above:
How good did you fill the reason changed fields?