Hi
I try to perform autotune after upgrade to 3.6-rc10.
Roll and Pitch was OK but during yaw tune copter fell down.
I cant see nothig wrong in log file
https://drive.google.com/open?id=1jhy62pjBk6FDZaMs433LEyU267d8IoC9
As I’m responding from a tab (haven’t looked into your log)
Is it underpowered ?
Pitch and Roll autotune finished but during the yaw autotune I noticed that the arm with motor number 4 was rised up and after a few attempts quad loose stability and fell down.
Next after reapir If I move forward left, right, hover It was looks ok. WhenI I try Yaw copter just fell down
Are you sure you posted the right log ? I see not crash or any anomaly in the log…
Here is the second log. After repair i try fly carfully and when i try yaw quad just fell down.
I do not know if the rason is the same…
2018-09-22 17-29-30.bin (609.4 KB)
Motor 4 failed.
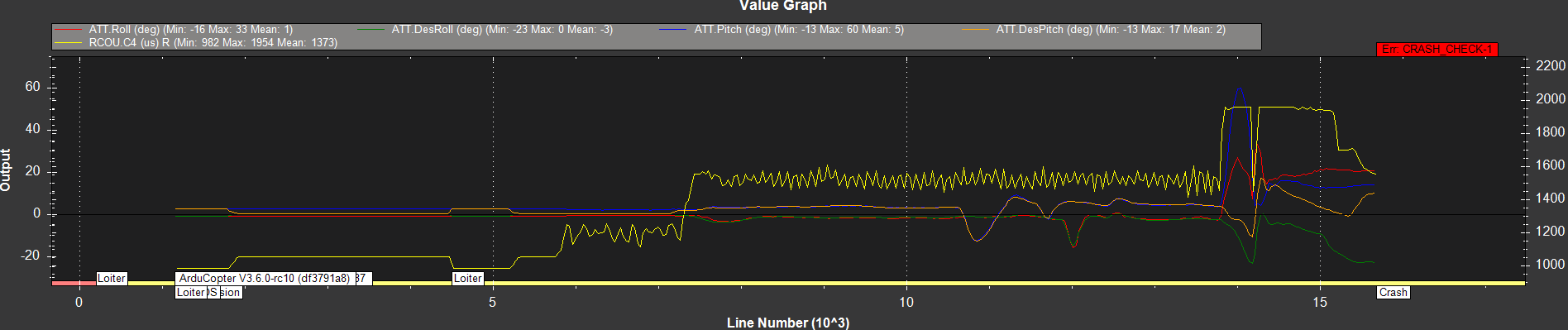
Motor 4 PWM maxed out while the copter flipped pitch up and roll right, which means that the motor was unable to deliver the desired thrust. This may be caused by:
- Bad wire connections to ESC or motor
- Motor or ESC overheat
- Faulty ESC or motor
1 Like
OK many thx
I will repleace esc first.
Is there a way to check before the flight that escs and motors works properly ?
regards
Or some unbalance of quad CG moved to this arm, weaker thrust of propeller, motor spin with resistance.
Test: Motor Balance = WARN - Motor channel averages = [1270, 1259, 1279, 1371]
Average motor output = 1294
Difference between min and max motor averages = 112